Доказательство теоремы
Докажем данную теорему. Для этого необходимо провести прямую линию через две любые точки твердого тела, осуществляющего поступательное движение – пусть это будут точки А и В.
Полученный отрезок АВ совершает перемещение по заданному пути: А описывает траекторию АА1А2А3Аn, а В соответственно – В1В2В3Вn.
Отсюда следует, что:
Принимая во внимание, что размеры данного отрезка АВ неизменны (const) при перемещении, а сам он имеет свойство двигаться в пространстве параллельно своему предыдущему местоположению, значит направления точки А и точки В совпадают.
Соотношение радиусов-векторов точек А и В в системе координат относительно ее начала – О (Рис 1),
![]()
Рис.1
можно выразить формулой:
где линии пути точки А соответствует функция rA(t), точки B – rB(t).
![]()
Теорема доказывает, что для определения поступательного движения твердого материального объекта достаточно знать параметры перемещения любой одной его точки. Следовательно, изучая кинематику передвижения точки тела, решается задача определения поступательного движения.
Сила упругости. Закон Гука
Сила упругости – это сила, возникающая при деформации тела.
Деформация – это изменение формы и объема тела в результате неодинакового смещения различных его частей под действием силы.
Виды деформаций:
- упругие – это деформации, при которых после прекращения действия внешних сил тело принимает первоначальные размеры и форму (растяжение, сжатие, изгиб, кручение, сдвиг);
- пластические – это деформации, которые сохраняются в теле после прекращения действия внешних сил.
Основные величины, характеризующие деформацию
Абсолютное удлинение – изменение размеров тела под действием силы.
Обозначение – \( x \) или \( \Delta{l} \), единицы измерения – м.
где \( l_0 \) – длина тела до действия силы (начальная длина),
\( l \) – длина тела во время действия силы.
Относительное удлинение – это количественная мера степени деформации тела.
Обозначение – \( \varepsilon \), единиц измерения нет.
Относительное удлинение равно отношению абсолютного удлинения к длине тела до действия силы (начальной длине тела):
Механическое напряжение – это сила, действующая на единицу площади поперечного сечения.
Обозначение – \( \sigma \), единицы измерения – Па (Паскаль):
Закон Гука
Сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению тела и направлена в сторону, противоположную деформации:
где \( k \) – жесткость пружины.
Знак «–» в законе Гука говорит о том, что сила упругости всегда направлена противоположно смещению частиц тела при деформации. При решении задач им можно пренебречь.
Виды силы упругостиСила реакции опоры – это сила, действующая на тело со стороны опоры.
Обозначение – \( N \), единицы измерения – Н.Сила натяжения – это сила, действующая на тело со стороны подвеса.
Обозначение – \( T \), единицы измерения – Н.
Важно!
Соединения пружин:
последовательное
• параллельное
Важно!
Если тело движется по окружности и нет силы трения между соприкасающимися поверхностями, то оно вынуждено наклоняться под углом к поверхности, по которой движется, иначе его центростремительное ускорение станет равным нулю и оно поедет по касательной к окружности согласно первому закону Ньютона. Чтобы удержаться на круге (сохранить равновесие), оно наклоняется к центру
В этом случае
Если тело совершает мертвую петлю, то в верхней точке петли и сила тяжести, и сила нормального давления будут направлены вниз, поэтому
В нижней точке мертвой петли сила нормального давления направлена вверх и больше силы тяжести. В этом случае
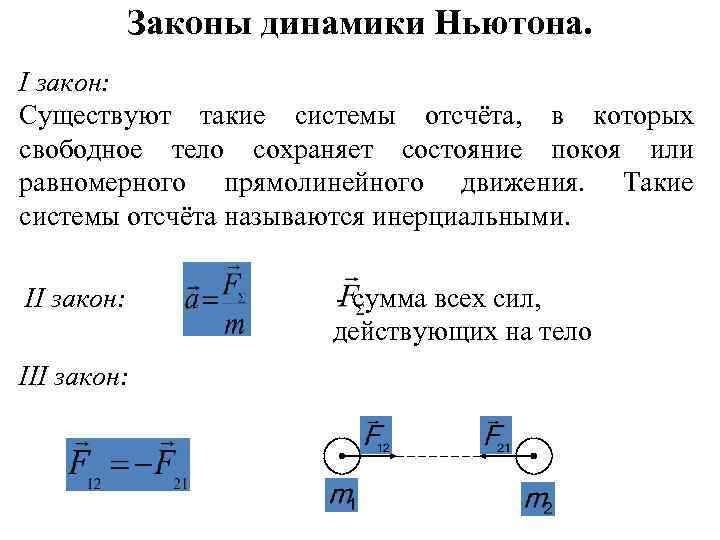
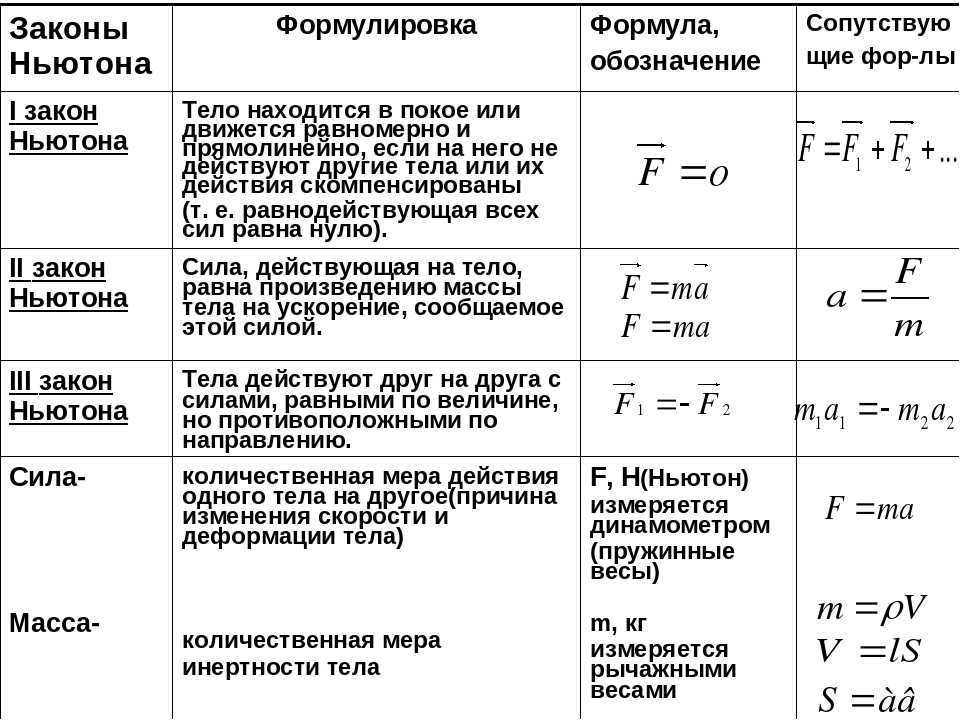
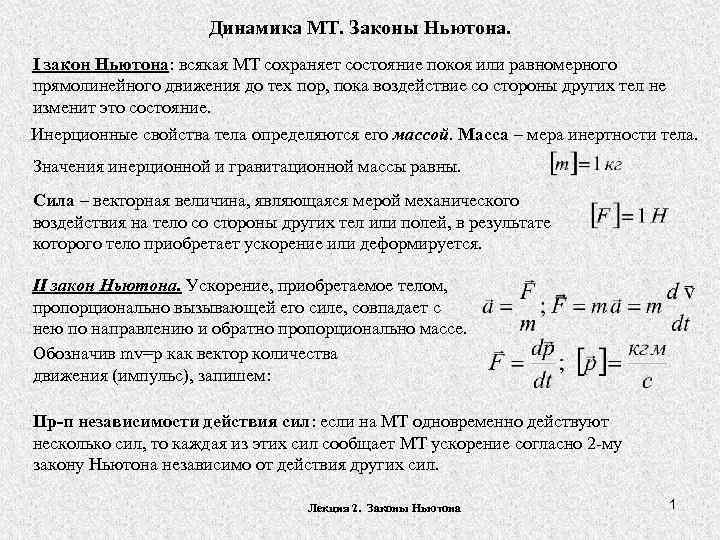
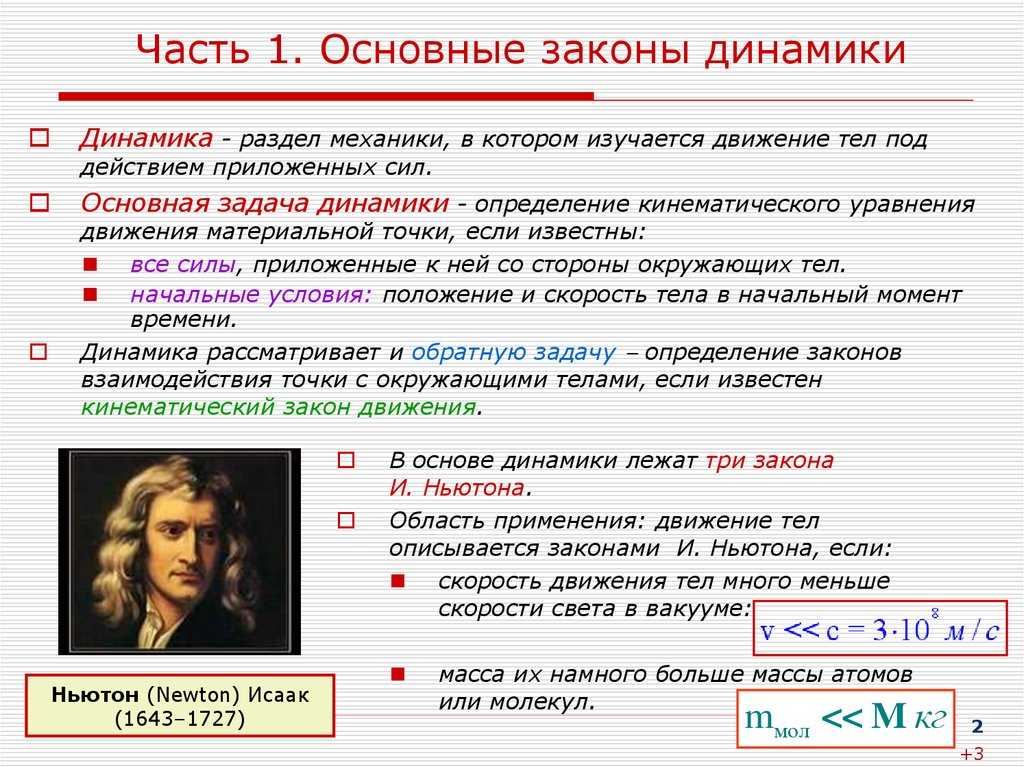
2.2.3. Первый закон Ньютона
Законы Ньютона представляют собой обобщение опытных данных (фактов). Эти законы устанавливались на основании наблюдений медленных по сравнению со скоростью света в вакууме движений.
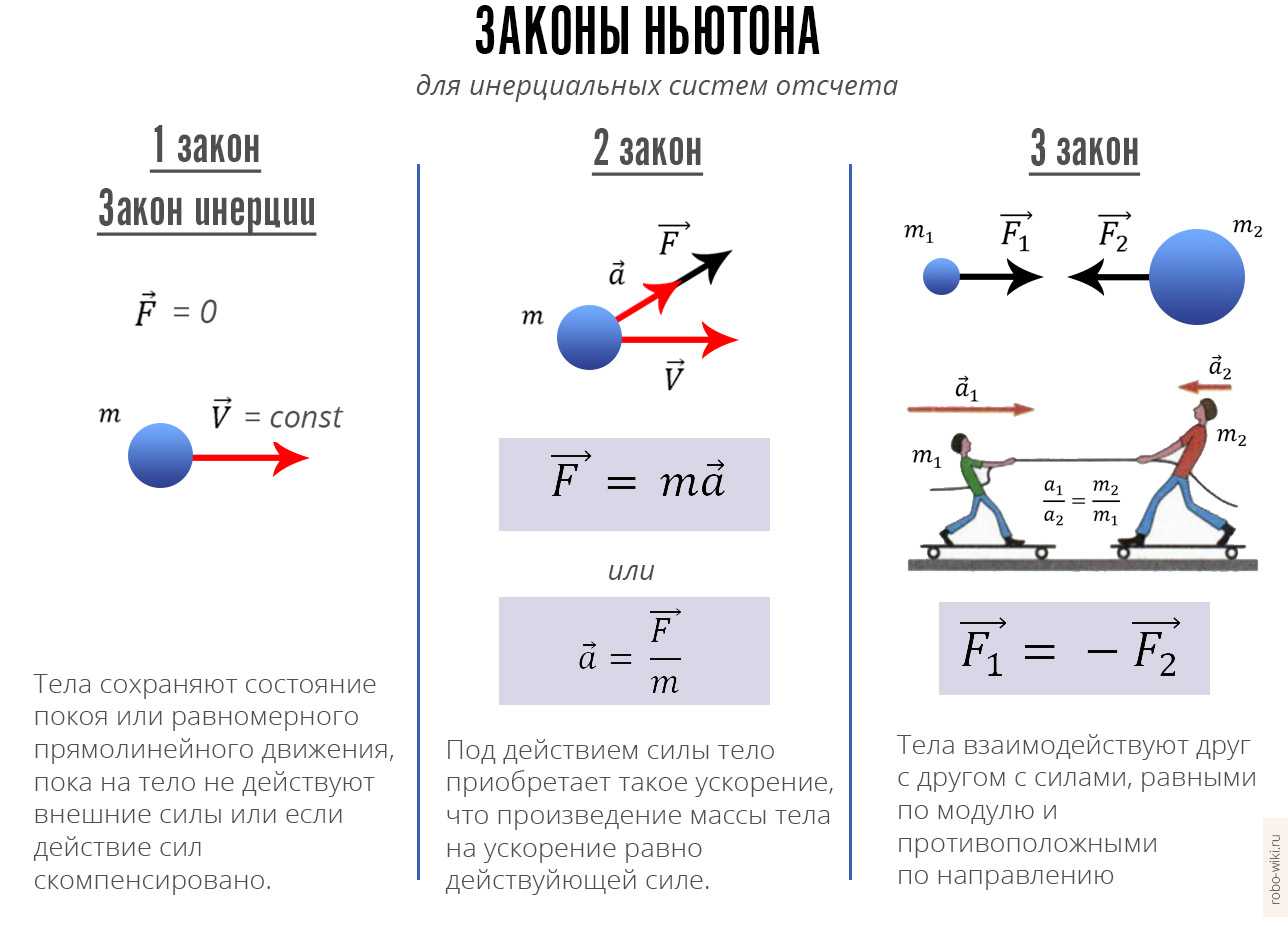
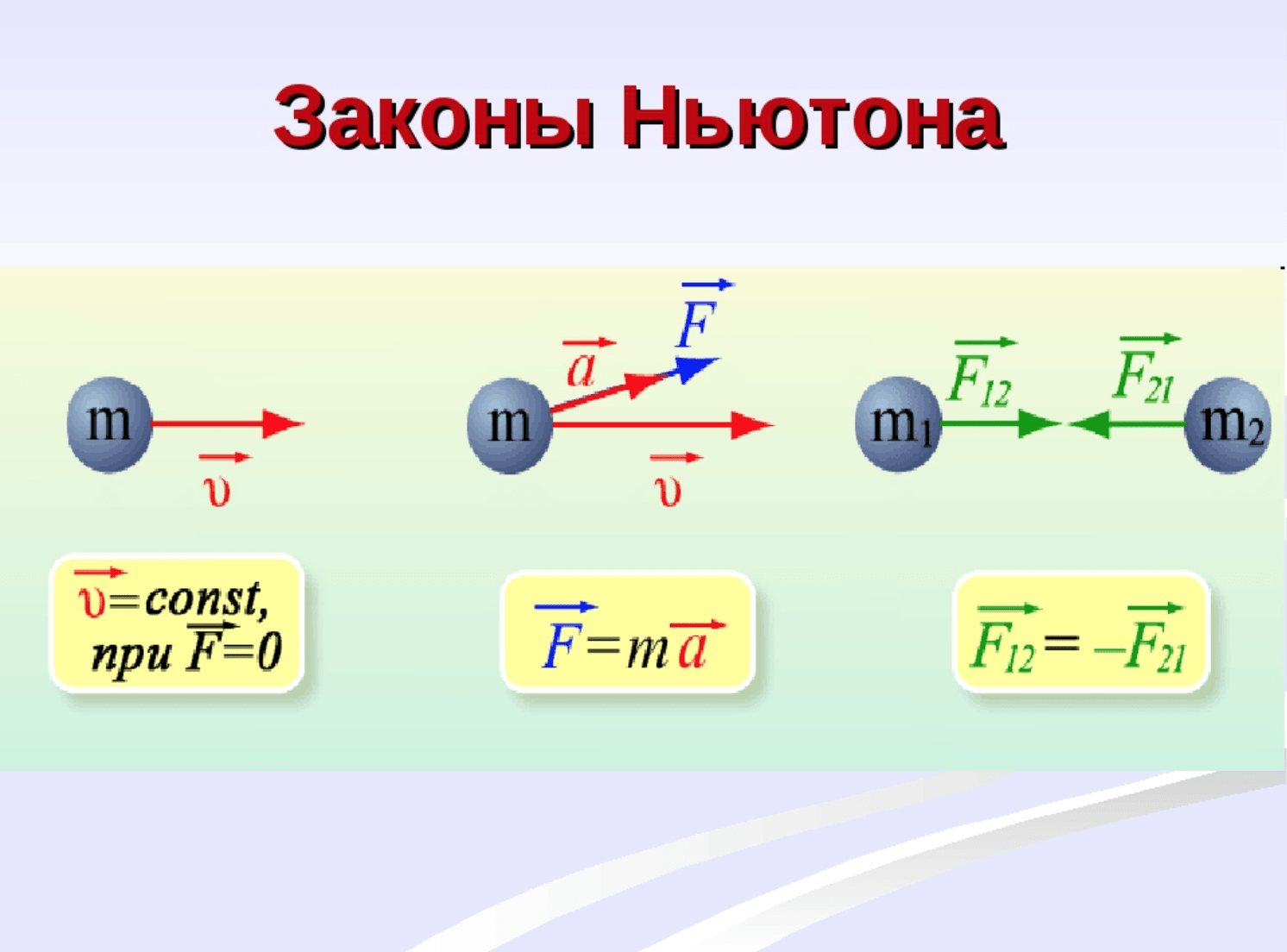
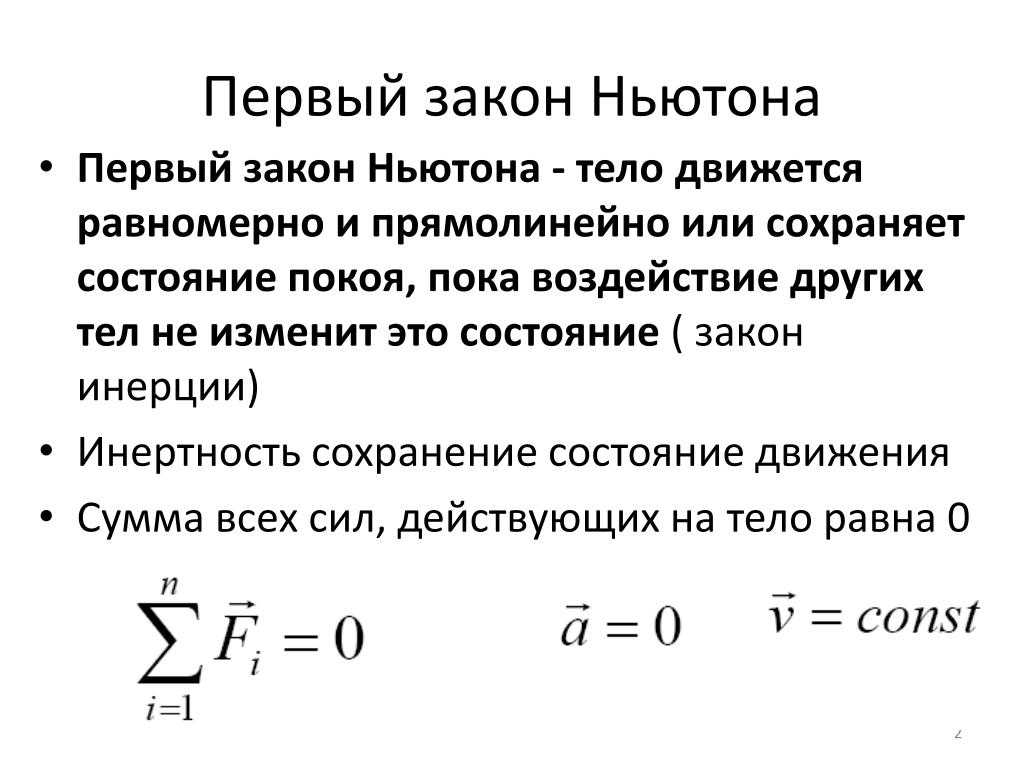
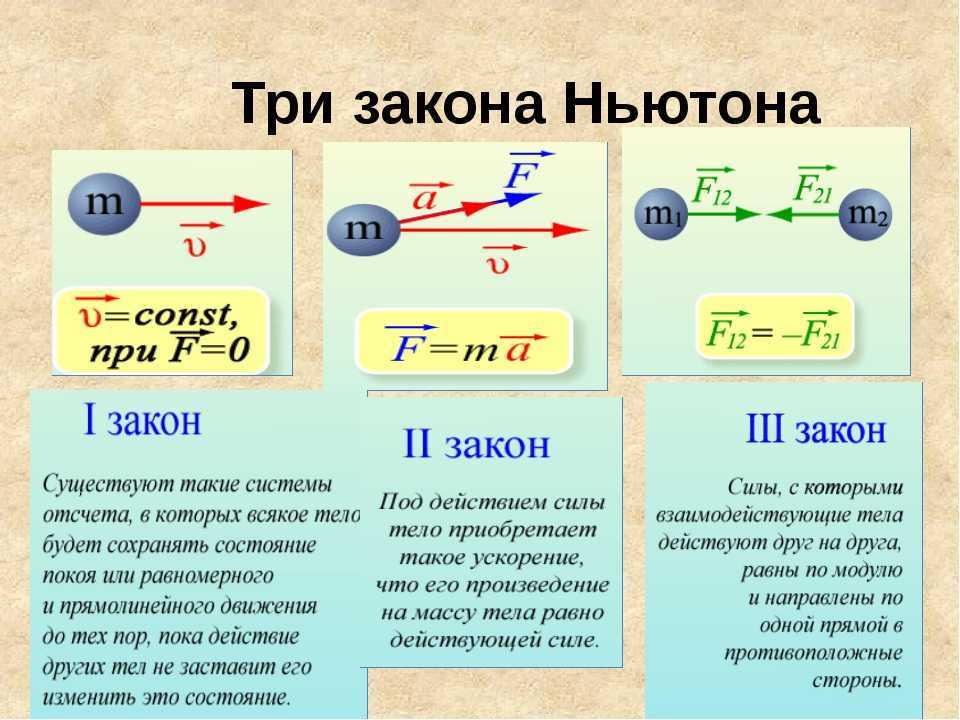
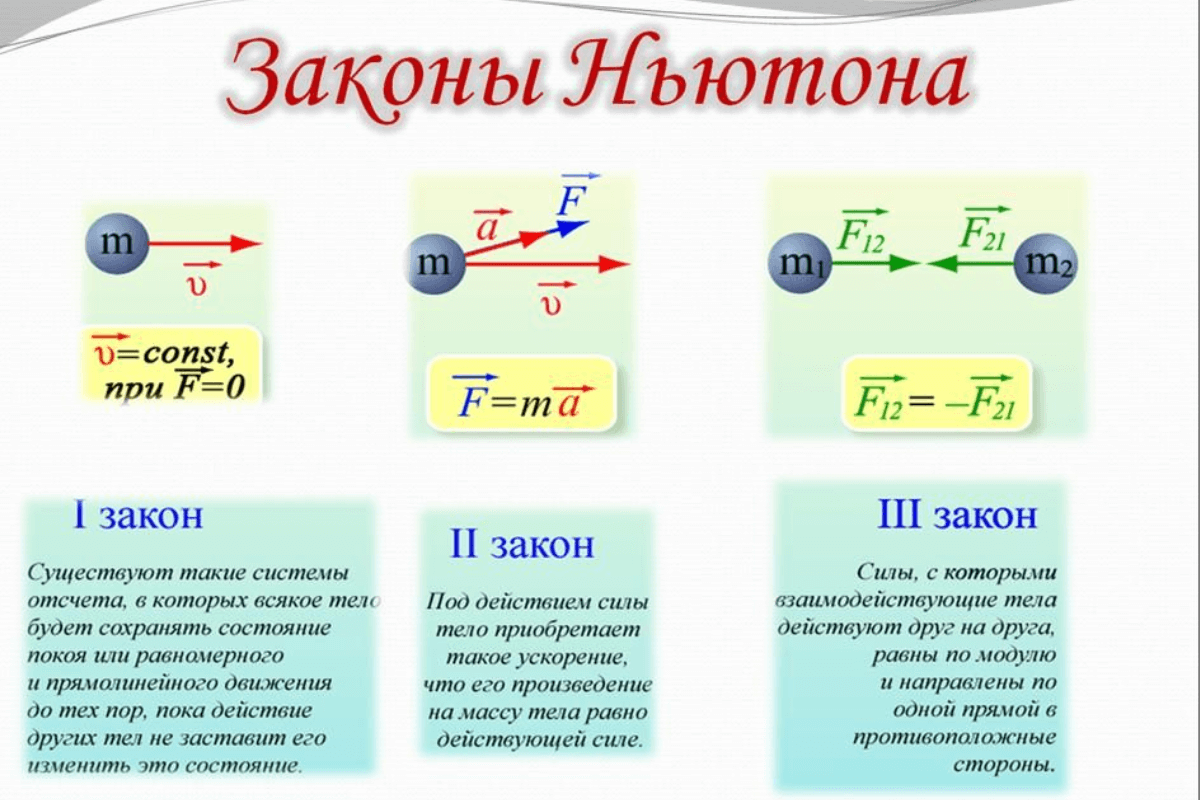
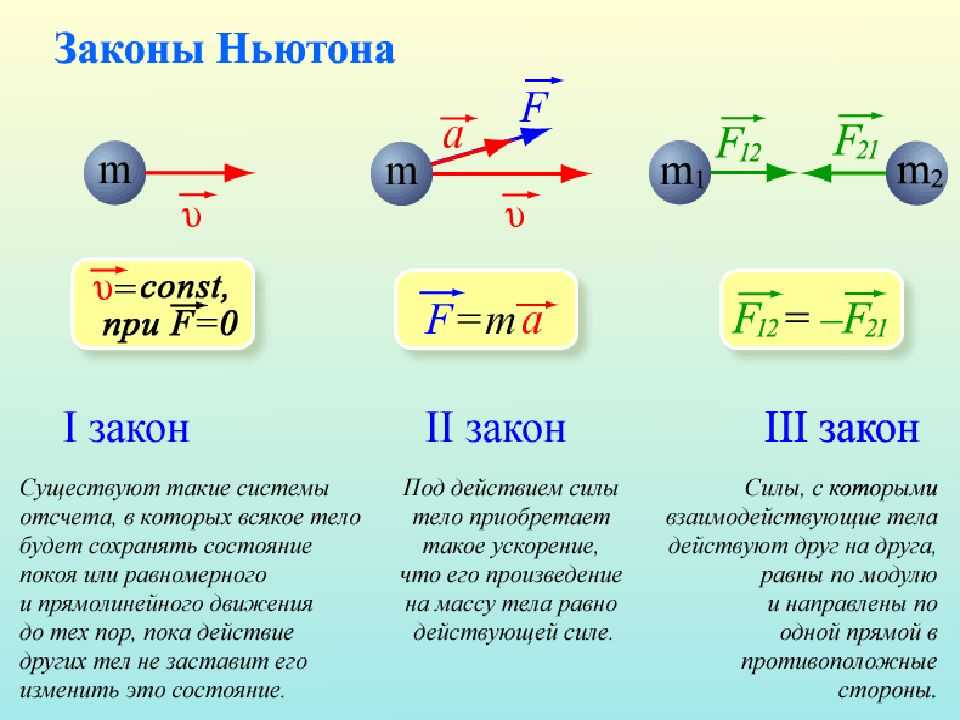
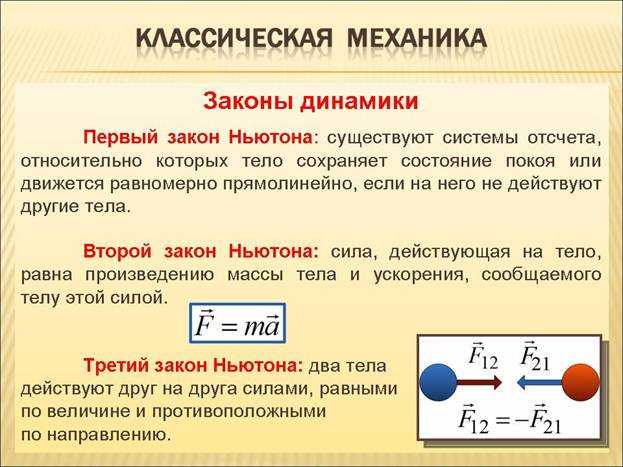
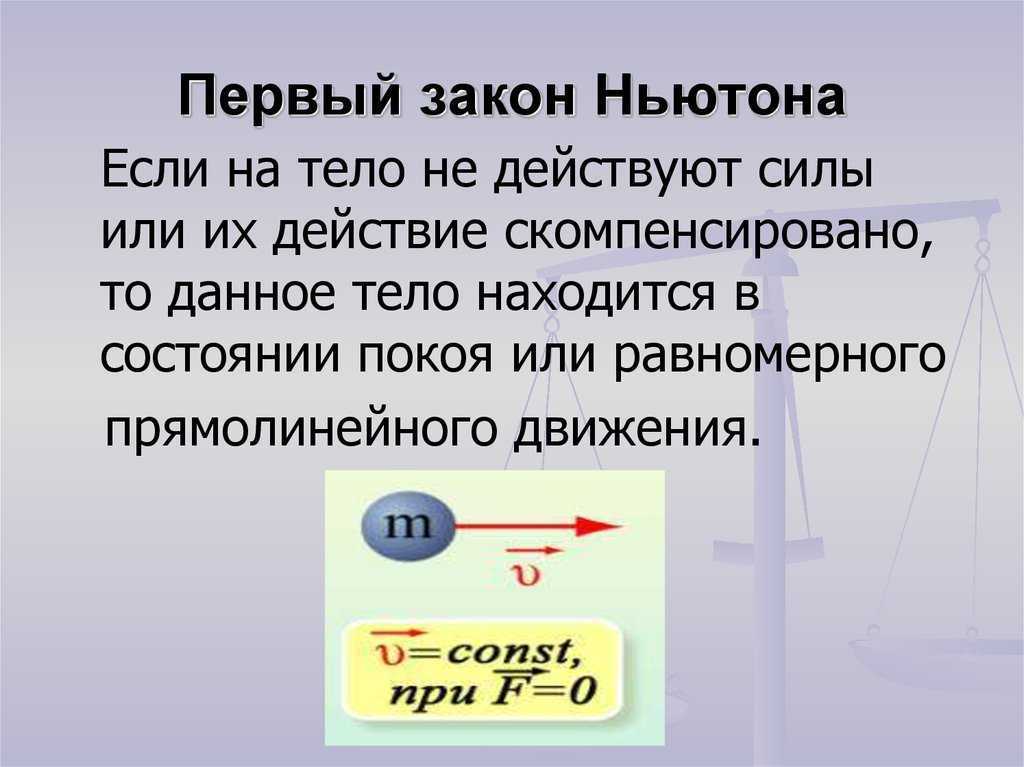
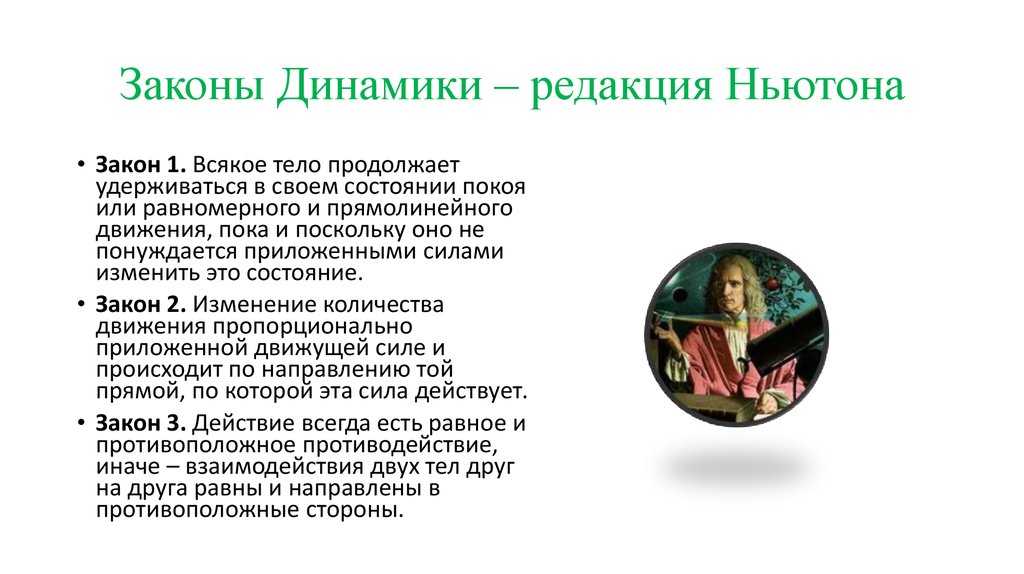
1-й закон Ньютона
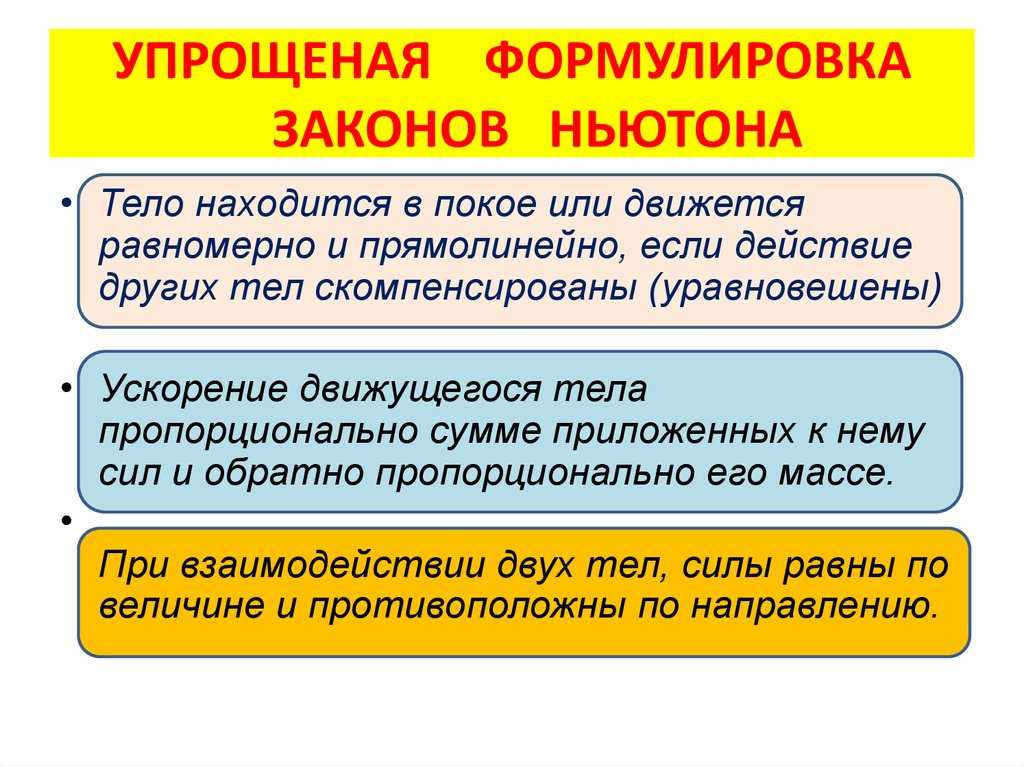
Всякая материальная точка или тело сохраняет состояние покоя или равномерного прямолинейного движения, пока на них не действуют силы или действие сил скомпенсировано.
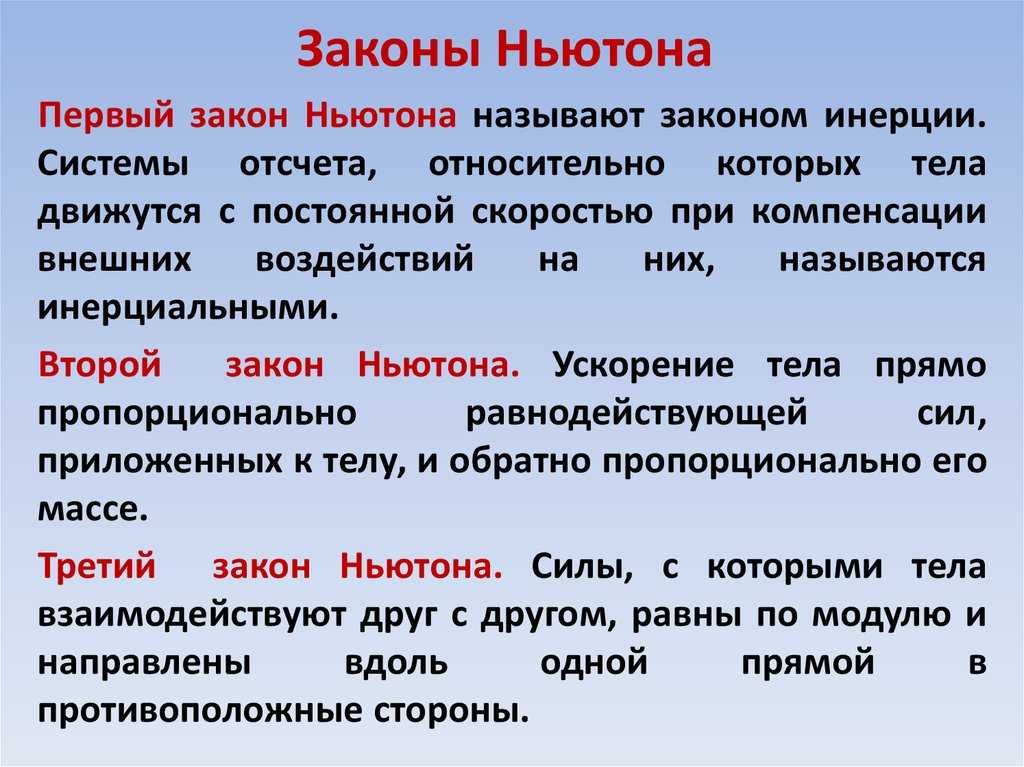
Этот закон называется законом инерции, а движение точки или тела, свободных от внешних воздействий, называется движением по инерции.
Покой — частный случай равномерного прямолинейного движения, когда а = 0 и v = const, или v = 0.
Любое механическое движение — относительное движение, его характер зависит от системы отсчета. Закон инерции справедлив не во всех системах отсчета.
Системы, в которых выполняется первый закон Ньютона, называются инерциальными.
Системы, в которых не выполняется первый закон Ньютона, называются неинерциальными.
Инерциальных систем бесконечно много. Любая система, движущаяся относительно данной инерциальной системы равномерно и прямолинейно, является также инерциальной системой.

Сбивание молока.
Процесс сбивания молока включает в себя вращение молока на высокой скорости с помощью блендера, миксера или даже вручную с помощью ложки. Через некоторое время при вращении сливки отделяются от молока и поднимаются вверх. Постоянное вращательное движение заставляет молоко менять свое состояние с жидкого на полужидкое. Следовательно, мы можем сказать, что сила, прилагаемая для вращения молока, является разновидностью динамической силы.
Теперь давайте подробно рассмотрим термин «динамика» для лучшего понимания..
Термин «динамика» относится к области классической механики, которая занимается изучением сил и их влияния на движение. Два основных типа динамики:
Линейная динамика:
Термин линейная динамика верен для объектов, которые распространяются или движутся по прямой линии, то есть объектов, имеющих линейное движение. Математически линейная динамика представлена линейными алгебраическими уравнениями.
Величины, подпадающие под линейную динамику, — это сила (произведение массы и ускорения), инерция или масса, скорость (т.е. смещение в единицу времени), смещение (в той же единице, что и расстояние), ускорение (смещение в единицу времени в квадрате) и импульс (произведение массы и скорости). Для большинства расчетов линейной динамики взятый объект рассматривается как частица с размером точки, масса которой сосредоточена в одной точке. Другими словами, мы можем сказать, что все силы действуют на центр масс этого конкретного объекта.
Линейное движение демонстрация. (пример динамики) Источник изображения: Зильбервольф, Линейно-таблица анимированная, CC BY-SA 2.5
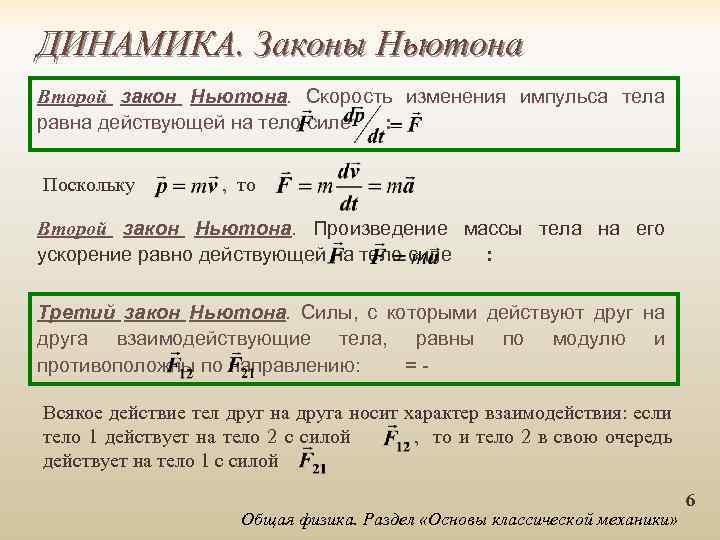
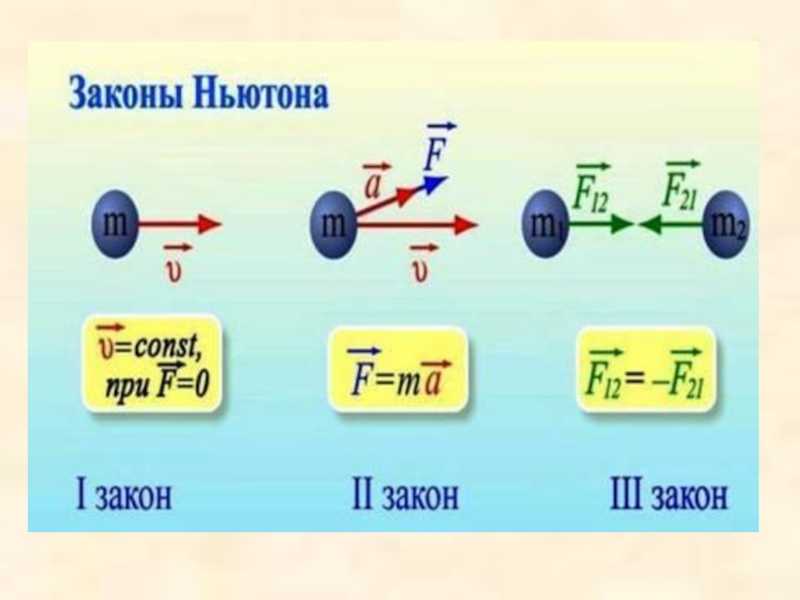
Линейная динамика и линейное движение в основном регулируются тремя законами движения сэра Исаака Ньютона.:
IДругими словами, мы можем сказать, что объект, на который не действует внешняя сила, может находиться либо в покое, либо в движении с постоянной скоростью в одном направлении.
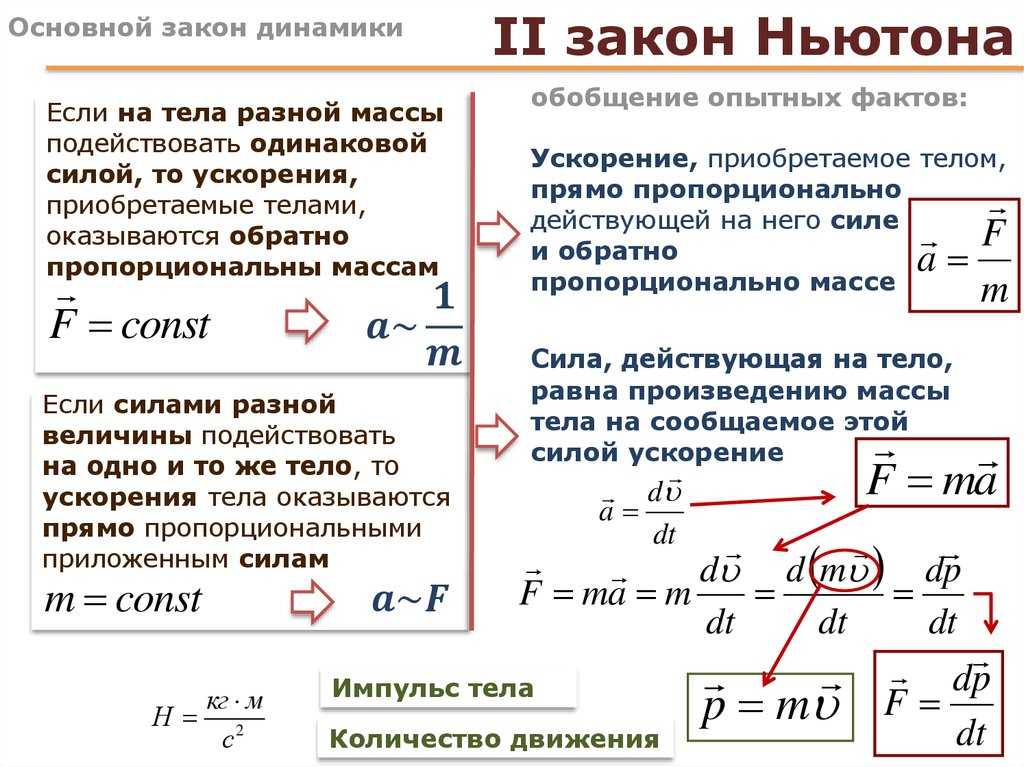
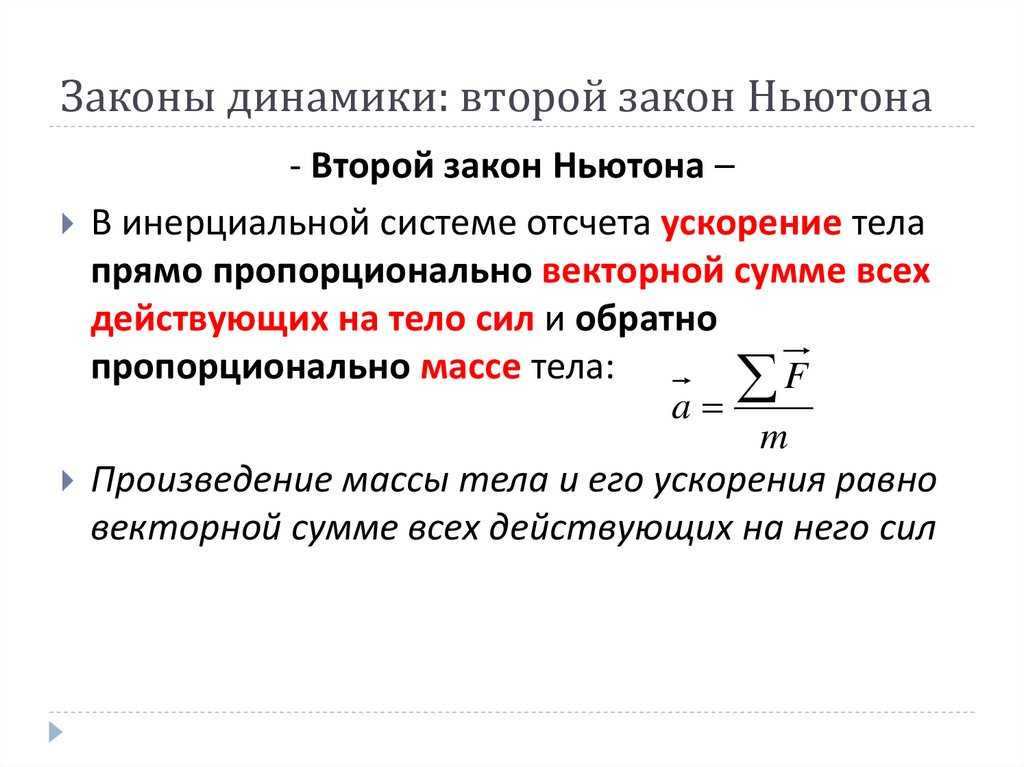
Ускорение прямо пропорционально чистой внешней силе, действующей на объект, и обратно пропорционально массе объекта. Другой способ определить второй закон состоит в том, что скорость изменения количества движения объекта эквивалентна чистой внешней силе, действующей на объект. Математически это можно представить как F = ма & dp / dt = Fсеть.
Это означает, что сила, действующая на объект, имеет форму пары, равной и противоположной по своей природе. Мы можем сказать, что если объект P оказывает силу на другой объект Q, то объект Q также оказывает такое же количество силы в направлении, противоположном направлению P. Математически 10 можно представить как Fp = — Fq.
Демонстрация третьего закона движения Ньютона. (пример динамики) Источник изображения: пример динамики Walber, Ньютон-реципрока, CC BY-SA 4.0
** Следует отметить, что три закона движения Исаака Ньютона действительны только в инерциальной системе отсчета.
Нелинейная / вращательная динамика:
Демонстрация вращательного движения. (пример динамики) Источник изображения: BorisFromStockdale, примеры динамики Вращающаяся сфера, CC BY-SA 3.0
Термин «нелинейная вращательная динамика» применяется к объектам, которые распространяются или движутся по вращающейся или изогнутой траектории. Физические величины, которые описываются динамикой вращения, — это крутящий момент (перекрестное произведение вектора силы и вектора положения), угловое смещение (в градусах или радианах), момент инерции или инерции вращения (произведение массы объекта на квадрат расстояния между центром тяжести объекта и базовой осью), угловое ускорение (радианы, пройденные в единицу времени в квадрате), угловая скорость (радианы, пройденные в единицу времени) и угловой момент (произведение момента инерции и угловой скорости).
Вращательной динамикой также можно управлять с помощью трех модифицированных законов движения:
Динамика систем со связями
В моделях, описывающих разл. движения, происходящие в природе и технике, объекты рассматриваются как системы материальных точек и твёрдых тел, соединённых связями механическими. В этих случаях в задачу Д. входит определение не только закона движения системы связанных точек и тел, но и сил реакции связей. Последние добавляются в уравнение $(1)$, записываемое для каждой точки системы. Для систем с т. н. идеальными связями (для которых сумма элементарных работ всех реакций при любом возможном перемещении системы равна нулю) Ж. Д’Аламбер и Ж. Лагранж разработали общие методы составления уравнений движения, не содержащих реакций связей (см. Д’Аламбера принцип и Д’Аламбера – Лагранжа принцип). Эти методы приводят к несколько иной формулировке общих теорем Д. (добавляются условия, налагаемые на связи), а сохранения законы динамич. мер приобретают математически строгую форму интегралов уравнений движения.
Кинетич. энергия – скалярная величина, обладающая определённой универсальностью. Ж. Лагранж ввёл понятие обобщённых координат и записал кинетич. энергию в виде функции от обобщённых скоростей и обобщённых координат. Используя эту функцию, Лагранж вывел новую форму уравнений движения механич. голономных систем (см. Лагранжа уравнения, Гамильтона уравнения, Вариационные принципы механики). Изучением свойств этих уравнений и их решений занимается аналитическая механика, методы которой нашли широкое применение в разл. областях физики.
Масса тела. Плотность вещества
Причиной изменения скорости движения тела является его взаимодействие с другими телами. Все тела обладают свойством, которое называется инертностью.Инертность – это способность тела изменять свою скорость не мгновенно, а за определенный промежуток времени.
Масса – это скалярная физическая величина, являющаяся мерой инертности тела.
Чем больше масса тела, тем труднее изменить его скорость и тем сильнее оно притягивает другие тела.
Свойства массы:
- масса не зависит от того, движется тело или покоится;
- масса тела равна сумме масс его частей.
Обозначение – \( m \), единицы измерения – кг (г, мг, т).
![]()
Плотность тела – это скалярная физическая величина, равная отношению массы тела к его объему.
Обозначение – \( \rho \), единицы измерения – кг/м3.
Особенности поступательного движения
Из определения поступательного движения следует первая его особенность – все точки тела, движущегося поступательно, движутся по одинаковым, смещенным друг относительно друга, траекториям. То есть все эти траектории представляют собой фигуры одной формы и размера.
Вторая особенность – прямая, проведенная через две любые точки тела всегда остается параллельна самой себе в другие моменты времени. То есть, ориентация тела в пространстве не меняется.
Третья особенность – поскольку все точки тела движутся по одинаковым траекториям, нет необходимости описывать движение всех точек. Кинематика поступательного движения тела учитывает движение только одной точки тела потому, что для остальных точек это движение будет таким же самым (напомним, что кинематика изучает только движение тела, не рассматривая взаимодействя с другими телами). Как правило, при этом принимается, что вся масса тела сосредоточена в этой точке, и такая точка называется «материальной», а ее положение внутри тела совпадает с центром масс.
Динамика поступательного движения тела (она изучает причины движения) также, как правило, рассматривает одну материальную точку, однако, при этом, в зависимости от ситуации, может потребоваться учет размеров тела.
2.2.9. Закон сохранения момента импульса
Обратимся к уравнению моментов dL/ dt = M, где M — главный вектор момента внешних сил.
Если M = 0, то и L = const.
Если относительно некоторой точки О выбранной системы отсчета момент всех сил, действующих на систему материальных точек, равен нулю, то относительно этой точки вектор момента импульса системы не изменяется с течением времени (закон сохранения момента импульса относительно полюса).
Примеры.
а) Человек стоит на скамье Жуковского, представляющей массивный, диск, который может вращаться вокруг оси, проходящей через его центр, с пренебрежимо малым трением. Момент импульса системы «человек — диск» равен нулю. Человек начинает идти вдоль обода диска. Диск начинает вращаться в обратную ходу человека сторону.
б) Фигурист выполняет «волчок», его руки раскинуты в стороны, его момент инерции относительно вертикальной оси вращения I1, угловая скорость ω1. Затем он резко прижимает руки к груди, его момент инерции уменьшается и становится I2, а угловая скорость ω2 увеличивается. При этом выполняется закон сохранения момента импульса относительно вертикальной неподвижной оси, проходящей через линию симметрии тела фигуриста I1∙ ω1 = I2∙ω2.
Примеры статического перемещения
| Пример | Описание |
|---|---|
| Автостатуя | Автостатуя представляет собой статический объект, который не двигается и сохраняет одно и то же положение всегда. |
| Картина | Картина находится на стене и не перемещается. Она статический объект, который не меняет своего положения. |
| Статичный текст на веб-странице | Текст на веб-странице, который не имеет анимации или эффектов, считается статическим перемещением. Он остается в одном месте без изменений. |
Это всего лишь некоторые примеры статического перемещения, которые можно встретить в повседневной жизни. Они не изменяют свое положение или состояние со временем и остаются в статичном состоянии.
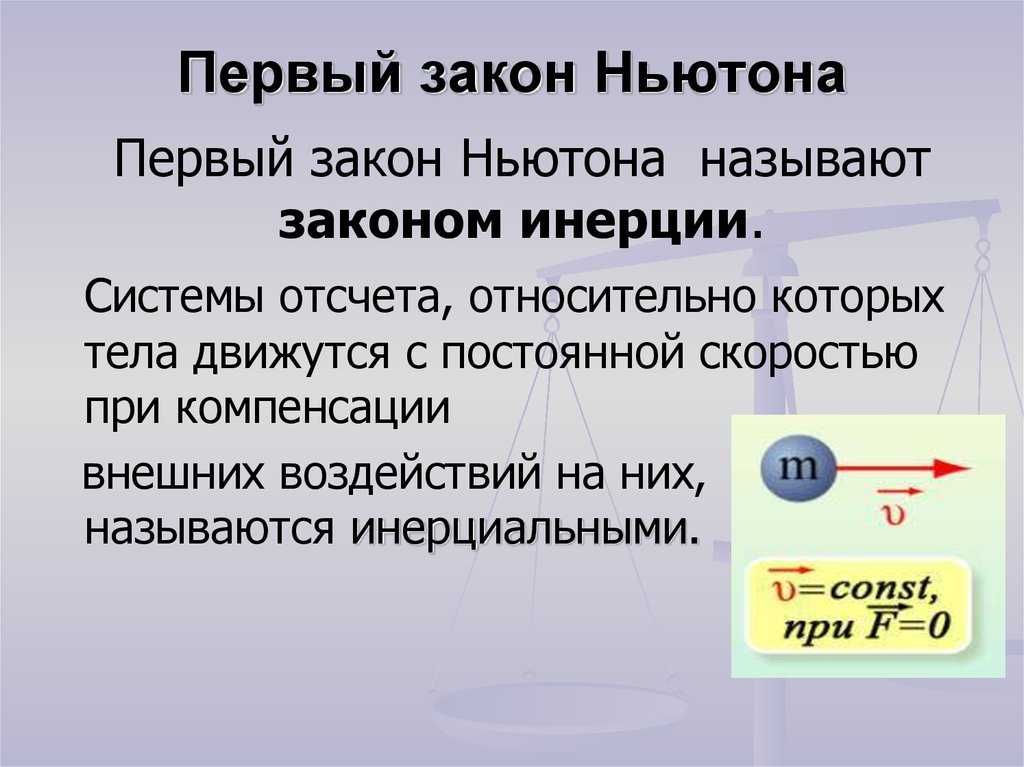
Первый закон Ньютона
Как мы уже знаем, движение осуществляется в системе отсчета. Так вот, существуют такие системы отсчета, которые называются инерциальными (ИСО). Что это значит? Это тоже идеализация, наподобие материальной точки. Существование ИСО постулируется первым законом Ньютона, который собственно гласит вот что:
Если в инерциальной системе отсчета мы разгоним автомобиль до скорости 60 км/ч, пренебрежем силой трения колес об асфальт и сопротивлением воздуха, а потом выключим двигатель, авто продолжит катиться по прямой со скоростью 60 км/ч бесконечно долго, пока не закончится дорога.
Масса и Вес
В системе СИ измеряется в килограммах. Если не ищете легких путей и хотите быть особенно экстравагантным, можете измерять в фунтах, пудах и унциях.
Важно! Не стоит путать массу тела и вес. Ведь масса – скалярная величина, а вес – это сила, с которой тело действует на опору или подвес
Другими словами, масса всегда остается постоянной, это собственная характеристика тела. А вот вес может меняться. Например, Ваш лунный вес будет отличаться от земного, т.к. ускорение свободного падения на планетах различно.
Вы все еще читаете? Поздравляем, Вы просто молодцы! Давайте переходить к законам Ньютона, ведь рассматривая основы динамики невозможно обойти их стороной. Законы Ньютона — основные законы динамики.
Что такое уравнения Максвелла?
Джеймс Клерк Максвелл сформулировал набор связанных дифференциальных уравнений в частных производных, объединив закон силы Лоренца, классическую оптику, электрические схемы и законы, лежащие в основе классического электромагнетизма. Эти уравнения теперь известны как уравнения Максвелла электромагнетизма.
Четыре уравнения Максвелла, управляющие полем электромагнетизма:
1. Закон Гаусса для электрические поля В нем говорится, что если мы интегрируем исходящее электрическое поле E по площади, результат равен полному заряду Q внутри объема, деленному на проницаемость пространства.
2. Закон Гаусса для магнитного поля- В нем говорится, что интеграл магнитного поля B по замкнутой области равен нулю.
3. Закон магнитной индукции Фарадея– Он утверждает, что интеграл электрического поля по замкнутой линии, такой как провод, дает изменение общего напряжения вокруг цепи. Это напряжение создается переменным магнитным полем по всей цепи.
4. Закон Ампера с током смещения Максвелла– Он обеспечивает общую магнитную силу вокруг цепи в виде тока в цепи с любым изменяющимся электрическим полем, вызванным током смещения.
Мы надеемся, что в этом посте была представлена вся необходимая информация о примере динамики в физике.
В чем принцип динамики?
Обычно исследователи и ученые, изучающие динамику, наблюдают за изменениями, происходящими в физической системе с течением времени, а затем анализируют причину этих изменений.
Динамика изучается путем наблюдения и анализа системы механики, разработанной сэром Исааком Ньютоном. Динамика регулируется фундаментальными физическими законами, разработанными Ньютоном. Второй закон движения, данный Ньютоном, особенно важен при изучении динамики
Однако из-за того, что все три закона движения в некоторой степени взаимосвязаны, мы должны принимать во внимание все три закона при наблюдении за динамикой системы
В случае классического электромагнетизма кинематика системы изучается уравнениями Максвелла. В классической системе динамика включает комбинацию электромагнетизма и механики, которая описывается уравнениями Максвелла, законами Ньютона и силой Лоренца.
Кинематика
Раздел кинематики отвечает на вопросы о том, как именно происходит механическое движение тела.
Механическое движение
Механическое движение — это перемещение тела с течением времени и относительно других объектов в пространстве.
Для расчета этих изменений понадобится система отсчета, которая состоит из:
- объекта, относительно которого будет происходить отсчет движения;
- системы координат, в которой находится объект отсчета;
- часов (для измерения времени).
В системе отсчета метр является единицей длины, а секунда — единицей времени.
Другими важными определениями в кинематике являются:
- Материальная точка — это объект, размеры которого можно не учитывать в расчетах.
- Траектория движения тела (линия, по которой движется объект).
- Путь, пройденный телом (определенный участок траектории, пройденный объектом за определенное время).
Существует 2 вида движения согласно траектории:
- прямое;
- криволинейное.
Поступательное и вращательное движение твердого тела
В кинематике выделяют два вида движения:
- поступательное;
- вращательное.
Поступательное движение — это движение твердого тела, при котором все его точки проходят одну и ту же траекторию и в любой момент времени обладают одинаковыми по направлению и величине векторами скорости и ускорения, синхронно меняющихся для любой точки объекта.
Вращательное движение — это вид механического движения, при котором материальное тело проходит траекторию окружности. При этом все точки тела описывают окружности, которые находятся в параллельных плоскостях. Центры всех окружностей находятся на одной прямой, которая перпендикулярна к плоскостям окружностей (называется осью вращения).



Кинематические уравнения движения
Определение местоположения материальной точки в пространстве можно осуществить двумя способами:
- учитывая зависимость координат от времени;
- учитывая зависимость от времени радиус-вектора.
Эту зависимости можно представить в виде кинематических уравнений движения:
\(x=x\left(t\right) \)
\(y=y\left(t\right)\)
\(z=z\left(t\right)\)
или
\(\vec r=\vec r\left(t\right)\)
Нулевой вектор на данной иллюстрации — это радиус-вектор положения точки в начальный момент времени.
Кинематические характеристики (скорость, ускорение)
Основными кинематическими характеристиками являются:
- скорость;
- ускорение.
Скорость \((\vec v)\) — это векторная величина, которая характеризует направление и быстроту движения.
Среднюю скорость можно вычислить по формуле:
\(\vec v=\frac{\Delta\vec r}{\Delta t}\)
где \(\Delta\vec r \) — перемещение, \(\Delta t\) — время, за которое это перемещение произошло.
Символом \(∆\) обозначается разность однотипных величин или совсем маленьких интервалов.
Мгновенная скорость может быть вычислена тогда, когда \(\Delta t\rightarrow0\) и вектор перемещения совпадает с путем перемещения:
\(\vec v=\frac{d\vec r}{dt}=\frac{dS}{dt}\)
Ускорение тела (a) является величиной, равной отношению изменения скорости движения тела к длительности промежутка времени, за которое это изменение скорости произошло. Оно рассчитывается по формуле:
\(a=\frac{\Delta V}{\Delta t}\)
Мгновенным ускорение будет являться тогда, когда среднее ускорение за промежуток ∆t → 0, м/с²:
\(a=\frac{dv}{dt}\)
2.2.6. Закон сохранения импульса
1. Совокупность тел, частиц (например, в газе) или отдельное твердое можно рассматривать как систему материальных точек. Если система с течением времени изменяется, то это означает, что изменяется ее состояние. Зная законы действующих на частицы системы сил и состояние системы в начальный момент времени, можно с помощью уравнений движения рассчитать состояние системы в любой момент времени. Но в некоторых случаях это может быть задачей достаточно сложной (сложна сама система или неизвестны законы действующих сил, или детальное рассмотрение поведения отдельных частиц системы не имеет смысла, например, в газе).
Возникает вопрос: нет ли каких-либо общих принципов, которые позволили бы иначе подойти к решению задач и обойти возникшие трудности? Оказалось, такие принципы есть. Это законы сохранения энергии, импульса и момента импульса (см. , стр. 52-57).
Эти законы справедливы не только в рамках классической механики. Все они являются универсальными законами природы, выполняются и в макромире, и в микромире, и во всей Вселенной. В настоящее время неизвестно ни одного эксперимента и ни одного физического явления, в котором упомянутые универсальные законы сохранения нарушались бы.
Закон сохранения импульса выполняется для замкнутых систем (см. 2.2.1. Динамические характеристики поступательного движения. Сила. Масса. Импульс, п.1).
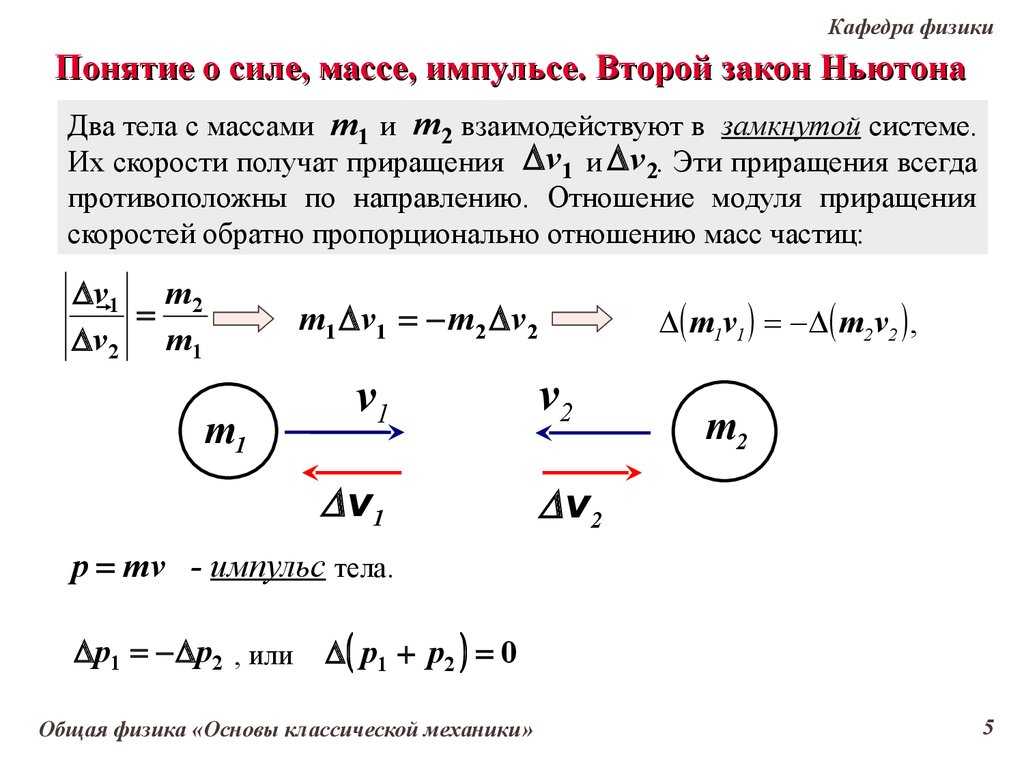
2. Справедливость закона сохранения импульса можно показать для замкнутой системы, состоящей из двух тел, применяя второй и третий законы Ньютона. Пусть первое тело, имеющее массу m1, движется со скоростью , второе тело, масса которого m2, движется со скоростью 2.
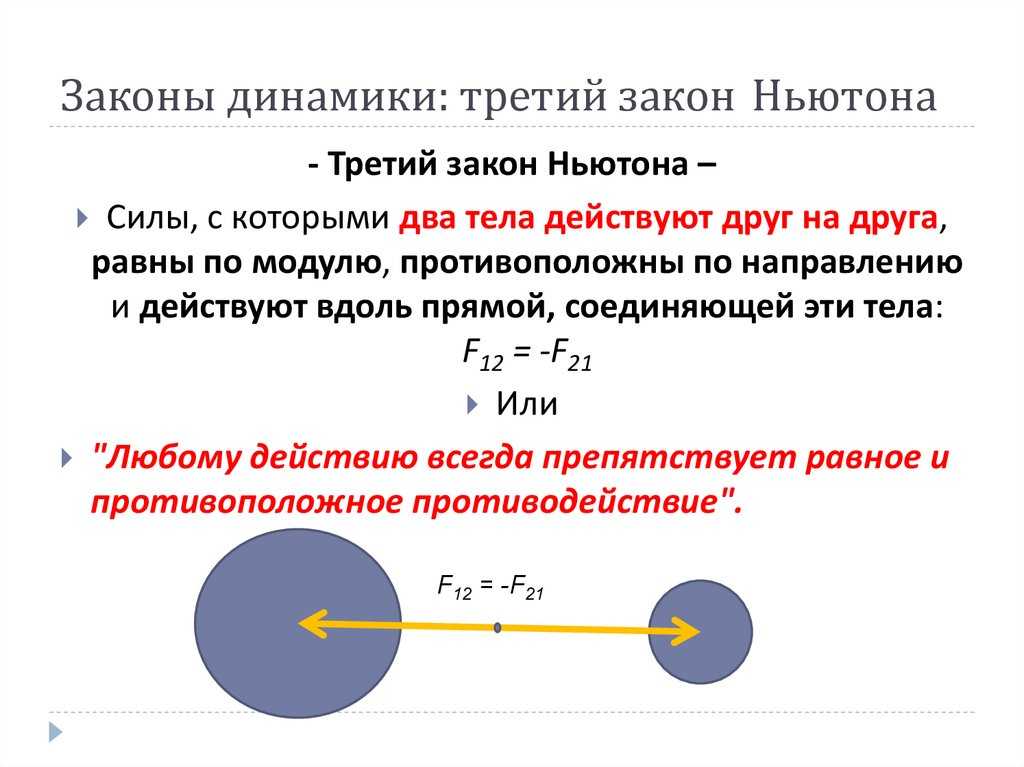
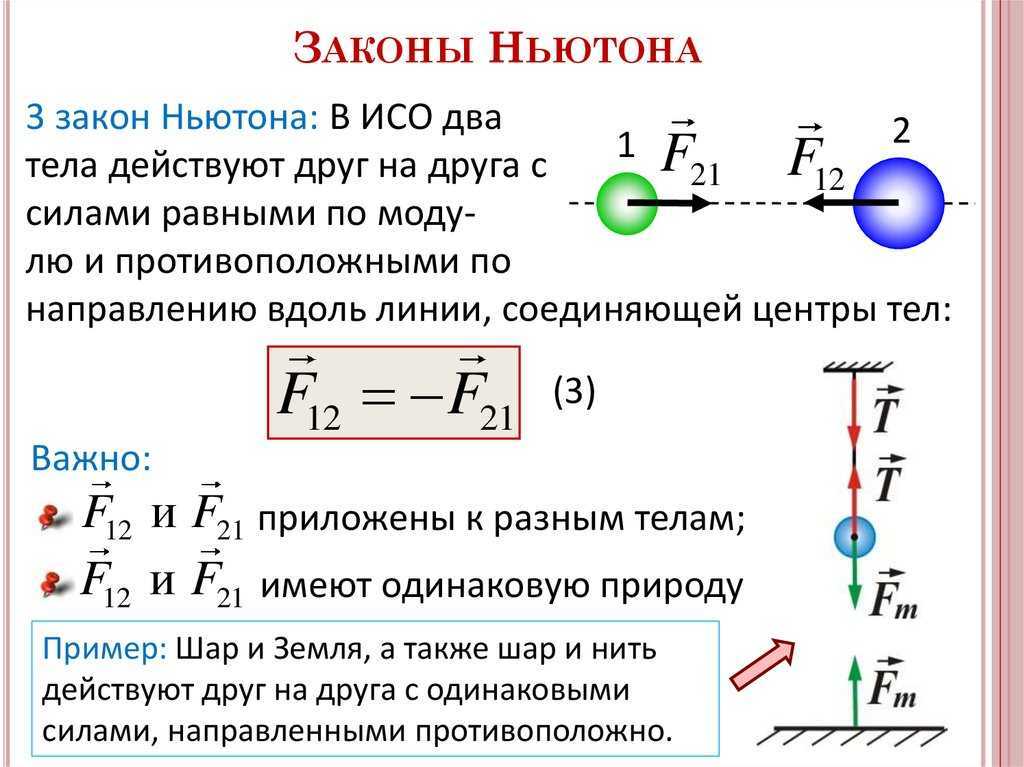
При столкновении тела взаимодействуют друг с другом, и, согласно Третьему закону Ньютона, сила 12 = — 21. По второму закону Ньютона сила F12, действующая на первое тело, изменит импульс первого тела, можно записать 12= , Точно так же можно записать, что сила F21 изменит импульс второго тела: 21= . Подставим значения F12 и F21 в третий закон Ньютона: = — , Т.к. время взаимодействия — одно и то же, то: = — или + = .
Рассматриваемая нами замкнутая система состояла из двух тел, полный вектор импульса этой системы = + ,
+ = — это изменение вектора полного импульса. При взаимодействии двух тел получили, что изменение вектора полного импульса = 0, следовательно, полный вектор импульса системы при взаимодействии не изменился: если = 0, то P = const.
Если система состоит из N тел, то P = m1∙ v1 + m2∙ v2 + ……..+ mN∙ v N есть полный вектор импульса замкнутой системы, и P = const.
Закон сохранения импульса (ЗСИ).
Полный вектор импульса замкнутой системы есть величина постоянная при любых взаимодействиях внутри данной системы. Только внешние силы изменяют импульс системы.
3. Если векторная сумма внешних сил не равна нулю, то надо посмотреть, нет ли такого направления, вдоль которого внешние силы не действуют или сумма их проекций на это направление равна нулю. Если такое направление в движении тел, входящих в систему, есть, то можно применять закон сохранения для проекции полного вектора импульса системы на выделенное направление.
Виды движений тела
Движение тела состоит в том, что все или часть его точек со временем меняет свое положение в принятой Системе Отсчета.
Рис. 1. Механическое движение.
Если точки тела меняют положение относительно друг друга, то тело изменяет свою форму
В зависимости от ситуации, такое изменение формы может быть существенным, и должно быть учтено, например, если для результата важно распределение массы тела (оно меняется при изменении формы)
Неподвижность точек тела друг относительно друга не означает неподвижность в Системе Отсчета. При этом возможны два случая: точки тела могут менять свое положение по-разному, а могут – одинаково.
Если все точки абсолютно твердого тела движутся по одинаковым траекториям в принятой Системе Отсчета, то такое движение называется поступательным. Если точки тела движутся по окружностям (не обязательно одного радиуса), центры которых лежат на одной прямой, такое движение называется вращательным, причем эта прямая называется осью вращения.
Часто встречаются промежуточные случаи – когда точки тела движутся по неодинаковым траекториям. В таком движении есть обе составляющих – как поступательная, так и вращательная.
Рис. 2. Поступательное и вращательное движение твердого тела.
Наиболее простым движением тела является поступательное. Оно и изучается в первую очередь.
Сила тяжести
Сила тяжести – это сила, с которой Земля притягивает к себе тела.
Сила тяжести равна произведению массы тела на ускорение свободного падения:
Точка приложения силы тяжести – центр тела.
Сила тяжести всегда направлена вертикально вниз.
Сила тяжести является частным случаем силы всемирного тяготения, поэтому
где \( M \) – масса Земли, \( m \) – масса тела, \( R \) – радиус Земли.
Ускорение свободного падения не зависит от массы тела, зависит от массы Земли и от расстояния от центра Земли до тела.
Важно!
У поверхности Земли ускорение свободного падения не везде одинаково. Оно зависит от географической широты: на полюсах больше, чем на экваторе
Дело в том, что земной шар немного сплюснут у полюсов. Экваториальный радиус Земли больше полярного на 21 километр.
![]()
Вес и невесомость
Вес – это сила, с которой тело вследствие притяжения к Земле действует на опору или подвес.
Обозначение – \( P \), единица измерения – Н.
Точка приложения веса – точка соприкосновения тела с опорой или подвесом. Вес тела всегда направлен против силы реакции опоры или силы натяжения. Модуль веса находится по третьему закону Ньютона.


![]()
Вес тела может изменяться:
если тело покоится или движется прямолинейно и равномерно, то вес равен силе тяжести:
если тело движется с ускорением, направленным вертикально вниз (движение вниз с ускорением или вверх с замедлением), то его вес меньше силы тяжести:
если тело движется вниз с ускорением, равным ускорению свободного падения, то тело находится в состоянии невесомости.Невесомость – это исчезновение веса при движении опоры вниз с ускорением свободного падения:
если тело движется с ускорением, направленным вертикально вверх (движение вверх с ускорением или вниз с замедлением), то его вес больше силы тяжести:
При таком движении тело испытывает перегрузку.Перегрузка – это величина, которая показывает, во сколько раз вес тела, поднимающегося с ускорением или опускающегося с замедлением, больше его веса в состоянии покоя.
Обозначение – \( n \), единиц измерения нет:
Что такое поступательное движение
Перемещение твердого тела (всех взаимосвязанных его точек) с помощью механического воздействия по заданной траектории и в определенном направлении, в результате которого отрезок из двух любых точек данного тела будет всегда параллелен своему расположению, предшествующему нынешнему, в каждый отрезок времени, называется поступательным движением.
![]()
В процессе перемещения характеристика объекта не меняется: по составу, форме и величинам сторон. Причем в любой отрезок времени точки объекта обладают одним и тем же направлением модулей векторов скорости и ускорения, а их величины равны.
![]()
Выделяют прямолинейное поступательное движение и криволинейное.
В качестве примеров поступательного движения в можно привести функционирование по определенной траектории различного оборудования и механизмов.
![]()
К ним относятся:
-
перемещение стрелы с грузом строительного подъемного крана относительно его кабины, в которой сидит рабочий;
-
подъем и спуск лифта в шахте;
-
педали у велосипеда. При этом каждая его точка, напротив, совершает вращательные движения;
-
совершение кабиной оборотов на колесе обозрения в парках аттракционов.