Примеры решения задач
Машина массой 1 тонна движется по ровной горизонтальной поверхности с ускорением 1 м/с2. Тяга силового агрегата составляет 1500 Н. Укажите действующие на транспортное средство силы.
Решение.
![]()
Сила тяжести направлена вертикально вниз. Модуль определяется следующим образом:
Fт = mg = 1000 (кг) х 9,81 (м/с2) = 9810 (Н).
Упругая реакция дороги направлена противоположно и равна тяготению, поскольку движение в данной плоскости отсутствует и равнодействующая равна нулю.
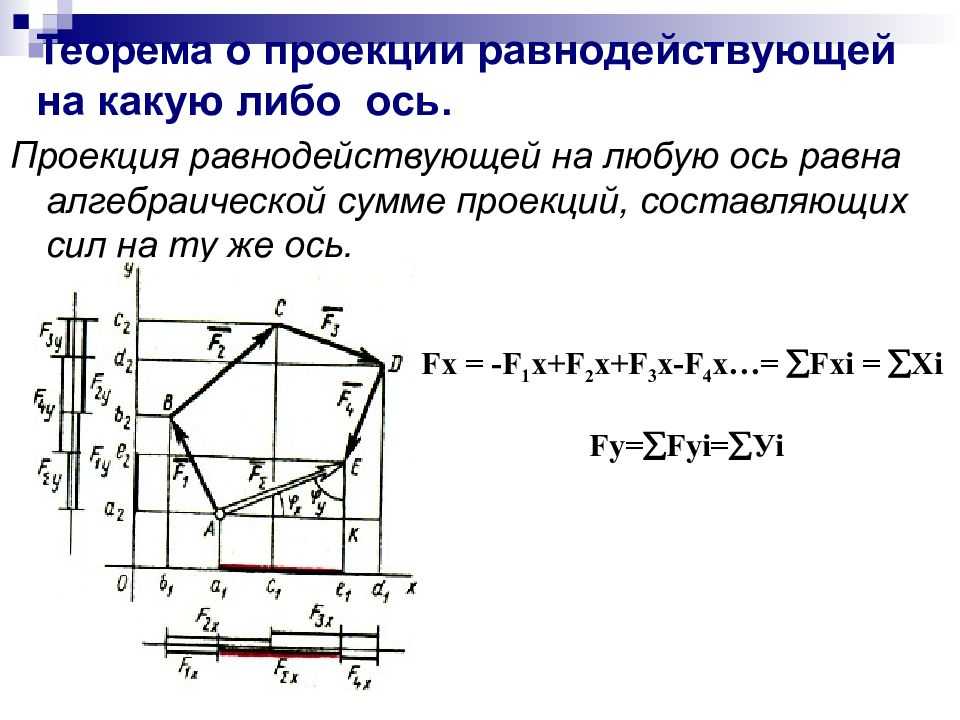
Горизонтальная равнодействующая:
F = ma = 1000 (кг) х 1 (м/с2) = 1000 (Н).
Сопротивление:
Fcопр = Fтяги – F = 1500 (Н) – 1000 (Н) = 500 (Н).
§ 1. Сложение двух сходящихся сил
Если в одной точке к телу приложены две силы под углом друг к другу, то их сложение выполняется по правилу параллелограмма.
Модуль равнодействующей R может быть определен аналитически из треугольника АВС с помощью теоремы косинусов (рис. 1):
![]()
так как .
Направление равнодействующей определяется углами и , которые можно рассчитать, применив теорему синусов. Для треугольника ABC
, (1)
откуда, учитывая, что , получим
, . (2)
Вместо параллелограмма сил можно строить силовой треугольник (рис. 2). Выбрав любую точку на плоскости рисунка, проводят из нее, сохраняя масштаб, вектор, равный и параллельный одной из заданных сил, например F1.
Из конца вектора F1 проводят вектор, равный и параллельный второй силе, F2. Начало первого вектора соединяют с концом второго, замыкая треугольник. Замыкающая сторона треугольника в данном масштабе представляет собой искомую равнодействующую. Модуль и направление равнодействующей определяют аналитически, как было показано выше.
При построении треугольника сил необходимо придерживаться правила: стрелки составляющих векторов направлены в одну сторону, а равнодействующей – им навстречу.
Частные случаи: 1) если , т. е. силы действуют по одной прямой в одну строну, то
;
2) если , т. е. силы действуют по одной прямой в разные стороны, то
;
3) если , то
Заметим, что определение равнодействующей двух сил по правилу параллелограмма или треугольника называется векторным, или геометрическим, сложением.
Задача 1. Определить равнодействующую двух сил и , модули которых соответственно равны Р1 = 40 Н и Р2 = 80 Н; сила направлена горизонтально вправо, а образует с угол a = 120° (рис. 3, а).
![]()
Задачу можно решить графоаналитическим методом, используя либо правило параллелограмма, либо правило треугольника.
Решение 1 – по правилу параллелограмма:
1. Используя условие задачи и приблизительно соблюдая масштаб, изображаем параллелограмм ABCD (рис. 3, б). Порядок построения такой: из точки А проводим отрезок , затем из той же точки А под углом 120° к отрезку АВ проводим отрезок , из точек В и С проводим прямые BD || АС и CD || AB и, наконец, проводим диагональ
2. Используя формулу (1), можем найти модуль равнодействующей:
Имея в виду, что cos120° = – sin 30° = – 0,5, получаем
Н.
3. Применяя к D ABD (или к D ACD) (см. рис. 3, б) теорему синусов, получаем
,
и ,
;
Таким образом, вектор равнодействующей перпендикулярен к силе ,
Угол j2 можно найти либо как разность
либо из теоремы синусов:
и j2 = 30°.
Один и тот же результат, полученный различными путями, подтверждает правильность решения задачи.
Ответ. Равнодействующая данных сил равна 69,3 Н и линия ее действия образует с направлением силы прямой угол.
Решение 2 – по правилу треугольника.
1. Используя условие задачи, строим треугольник сил ABC (рис. 3, в). Порядок построения такой: из точки А проведем отрезок . Затем из точки В под углом a = 120° к направлению проводим отрезок и, наконец, «замкнем» треугольник отрезком АС, который изобразит искомую равнодействующую
В получившемся треугольнике
2. Применяем к треугольнику ABC известную из тригонометрии теорему косинусов:
откуда модуль равнодействующей
Н.
3. Углы j1 и j2, определяющие направление равнодействующей относительно заданных сил, находим, как и в первом решении, по теореме синусов.
Теоретическая механика (стр. 1 )
| Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 |
Министерство образования Российской Федерации
Владивостокский государственный университет
экономики и сервиса
Г. Л. ОВСЯННИКОВА
Рецензент , канд. техн. наук, профессор каф. ФХ и ПМ ВГУЭС
Ч 81 ТЕОРЕТИЧЕСКАЯ МЕХАНИКА: Учебное пособие. Ч. 1. – Владивосток: Изд-во ВГУЭС, 2003 – 128с.
Учебное пособие представляет собой комплекс, содержащий основные сведения о теории, необходимые для самостоятельного решения задач. В каждом разделе даны рекомендации о последовательности решения различных типов задач и приведены подробные методические указания к решению подобных задач. Может использоваться как теоретическая часть при подготовке к сдаче экзамена или зачета, так и в качестве методических указаний к решению задач на практических занятиях, при выполнении контрольных работ заочниками и расчётно-графических заданий.
Для студентов всех форм обучения.
ã Издательство Владивостокского
экономики и сервиса, 2003
Ответы на вопрос
для решения используем уравнение менделеева — клапейрона
поделим правые части уравнений на правые, а левые на левые
m2 = 0,5m1 = 0,5×2 = 1 кг — осталось в
δm = m1 — m2 = 2 — 1 = 1 кг — масса вытекшего газа
2 v=m/m=1000/44=22,72 моль
3 m0=m/na=0,028/6,02*10²³=4,65*10⁻²⁶ кг
4 v=m/m=1/18=0,056 моль
5 vср=√(3rt/m)=√(3*8,314*273/0,019)=598,7 м/с
закон джоуля-ленца q=i²rt
пеодставим выражения для i в закон джоуля-ленца
сопротивление при последовательном подключении ламп: r=nr
в первом случае 20r, во втором 15 r. сопротивление снизилось
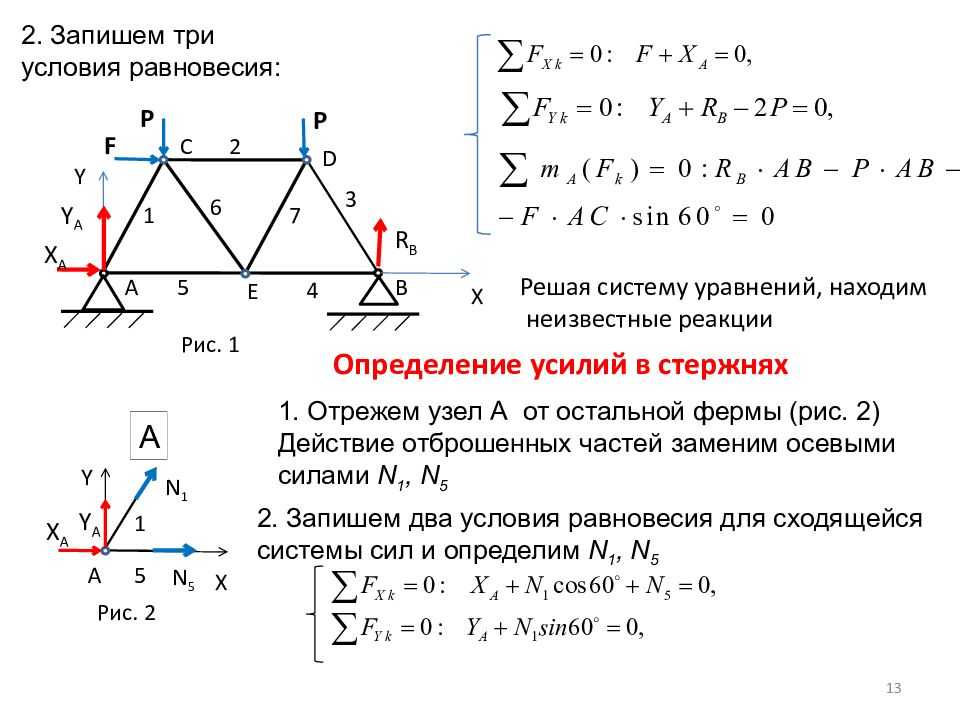
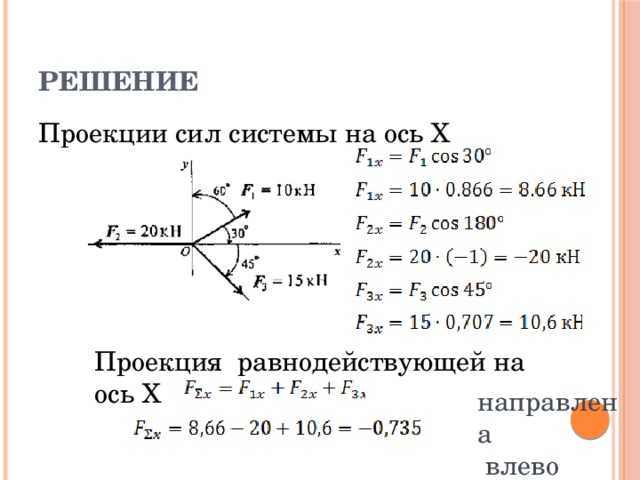
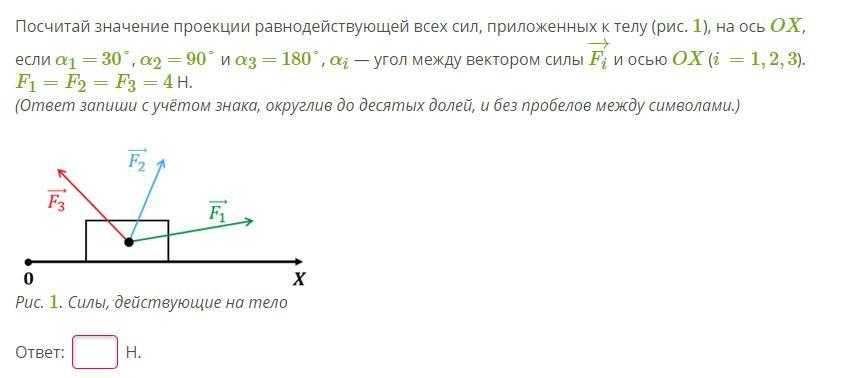
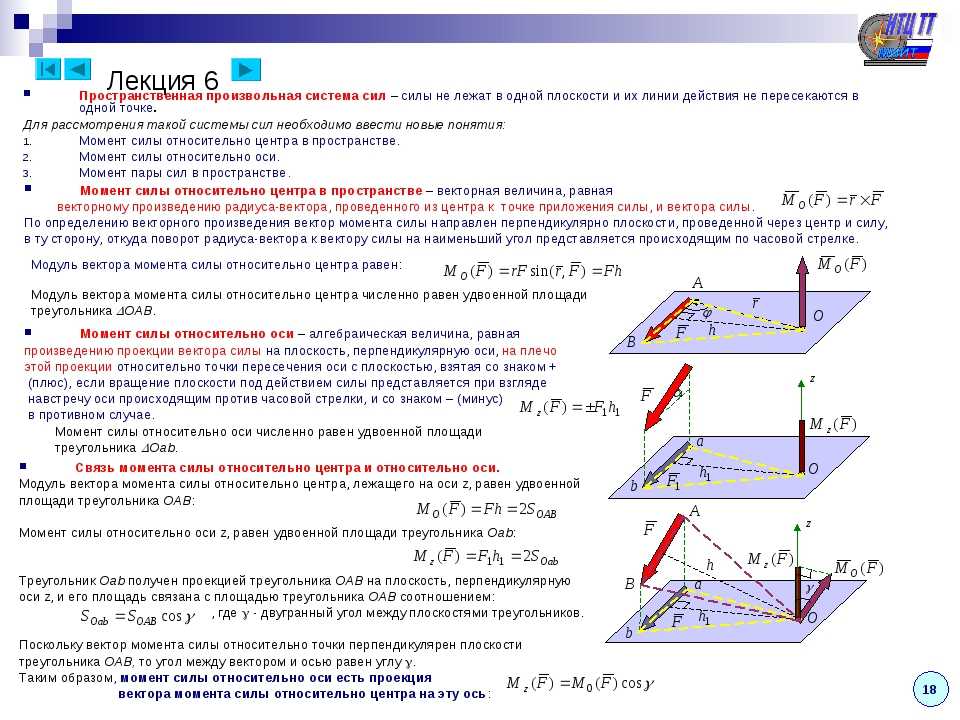
Заданы модули сил F1, F2, F3, пересекающихся в одной точке, и направление этих сил – углы α1, α2, α3 относительно оси Х (рис. 1.1 и табл. 1.1) .
Цель работы – произвести графическое и аналитическое исследование плоской системы сходящихся сил, выявить уравновешена ли заданная система сил.
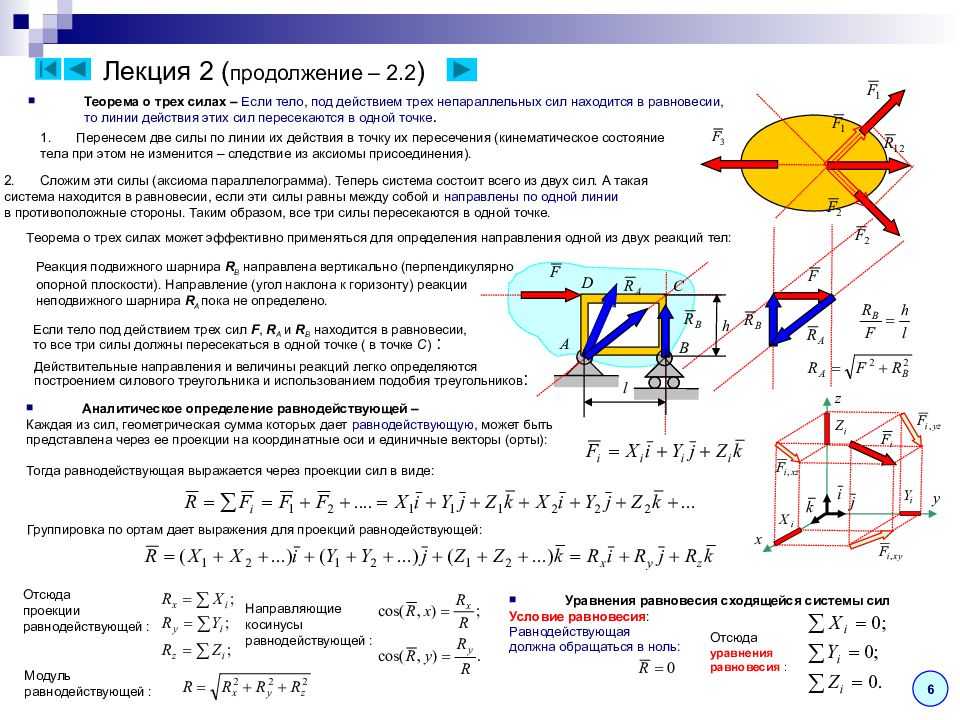
Исследование любой системы сил начинают с определения взаимного расположения сил. Если линии действия всех сил расположены в одной плоскости и пересекаются в одной точке, то они образуют плоскую систему сходящихся сил.
Силы, действующие на абсолютно твёрдое тело, допускаются переносить вдоль линии их действия, поэтому сходящиеся силы можно всегда приложить в точке пересечения их линий действия. Последовательно складывая сходящиеся силы, плоскую систему сходящихся сил приводят к одной равнодействующей.
Один из главных вопросов при исследовании системы сил – является ли данная система сил уравновешенной или неуравновешенной. Необходимым и достаточным условием уравновешенности системы сходящихся сил является равенство нулю их равнодействующей силы. Материальная точка, к которой приложена уравновешенная система сил, находится в состоянии покоя или прямолинейного равномерного движения.
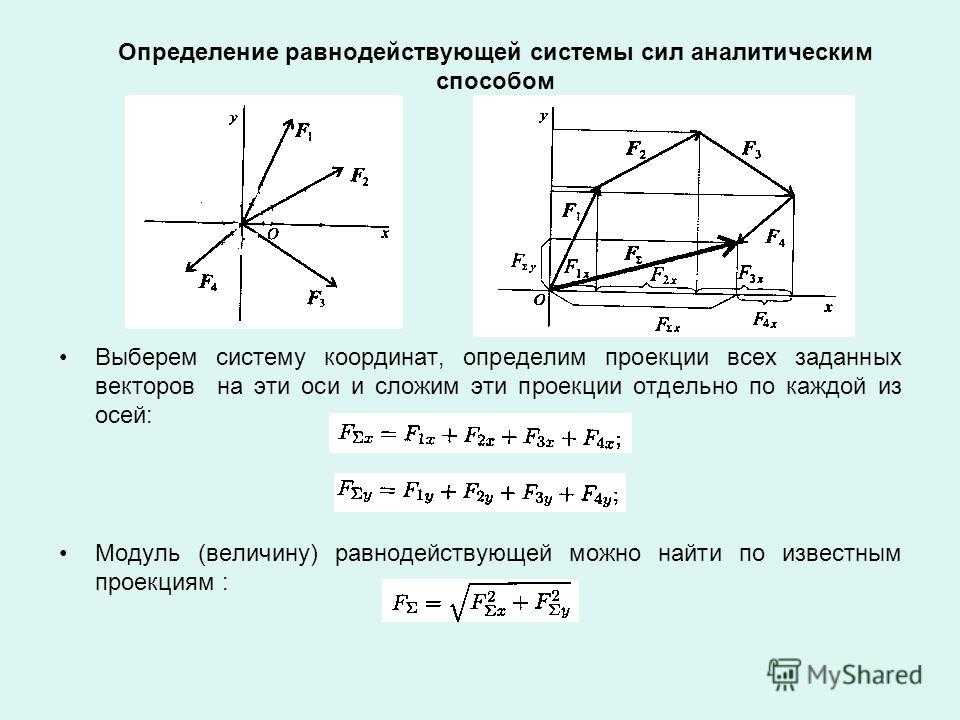
Сложение сил можно произвести двумя способами: графически и аналитически. Графическое сложение плоской системы сходящихся сил производят построением силового многоугольника (рис. 1.2) .
Для этого из произвольной точки откладывается вектор силы F1, из конца которого откладывается вектор силы F2 и т.д. Равнодействующая сила является замыкающей стороной силового многоугольника. Графический способ позволяет довольно быстро и очень наглядно произвести сложения сил, но точность определения модуля и направления равнодействующей зависит от точности построений.
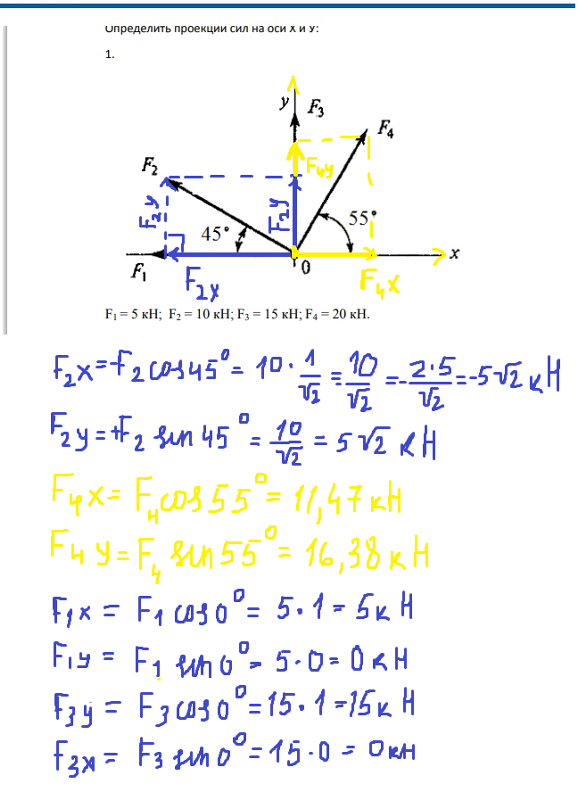
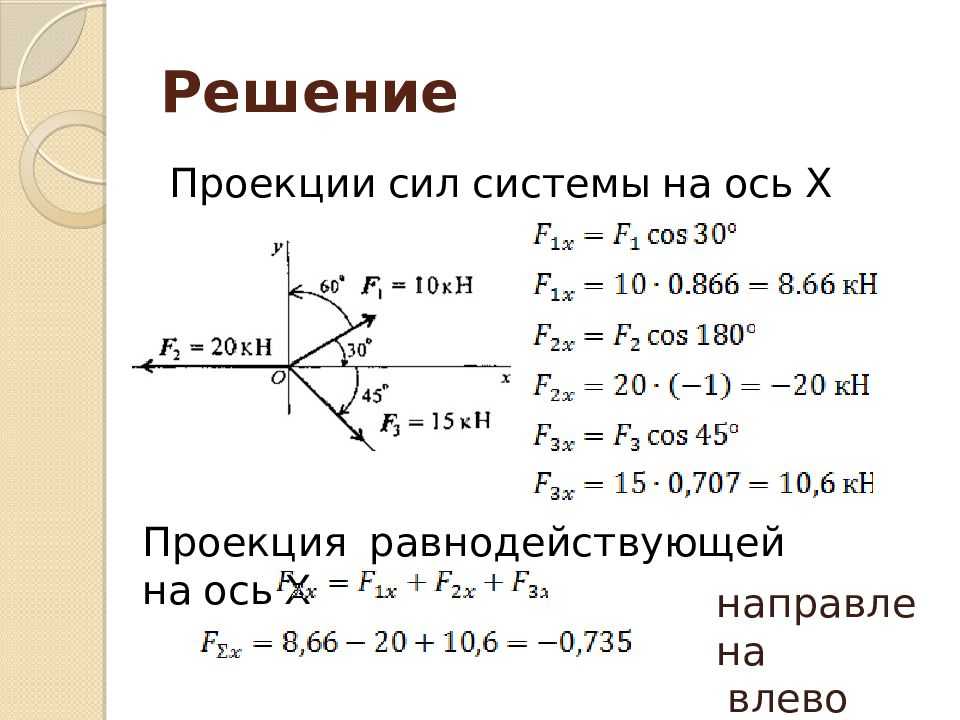
Более точные результаты можно получить, применяя аналитический способ, оснований на вычислении всех заданных сил на оси Х и Y:
где Fi – модули заданных сил,
α – угол между силой F; и осью х.
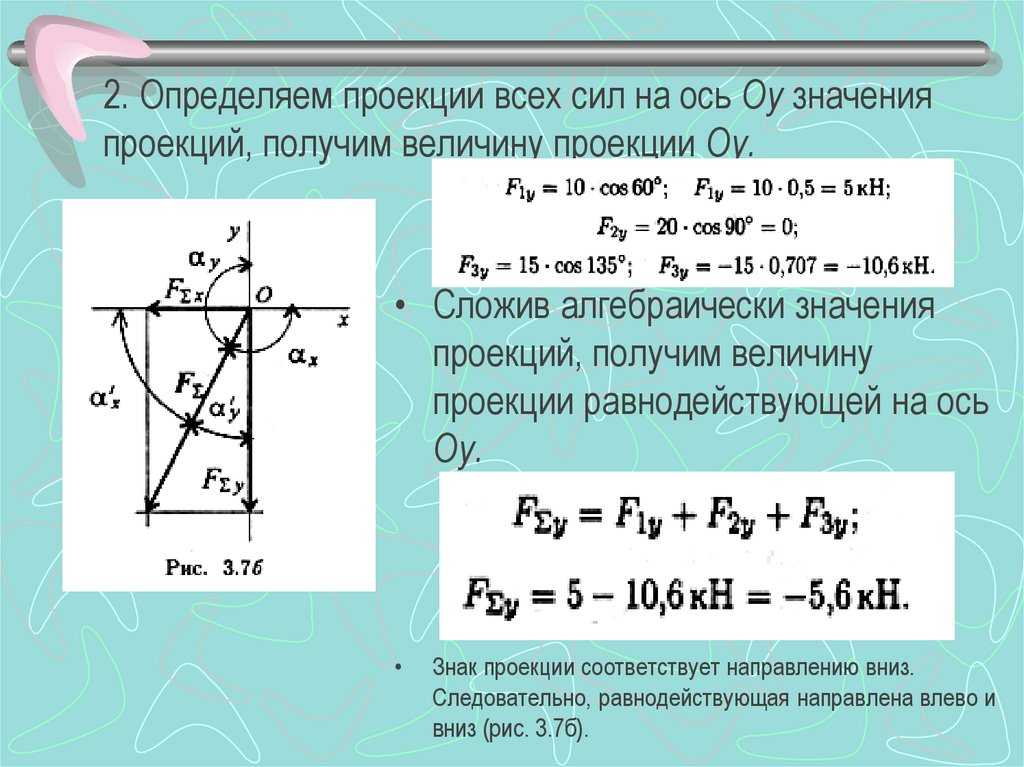
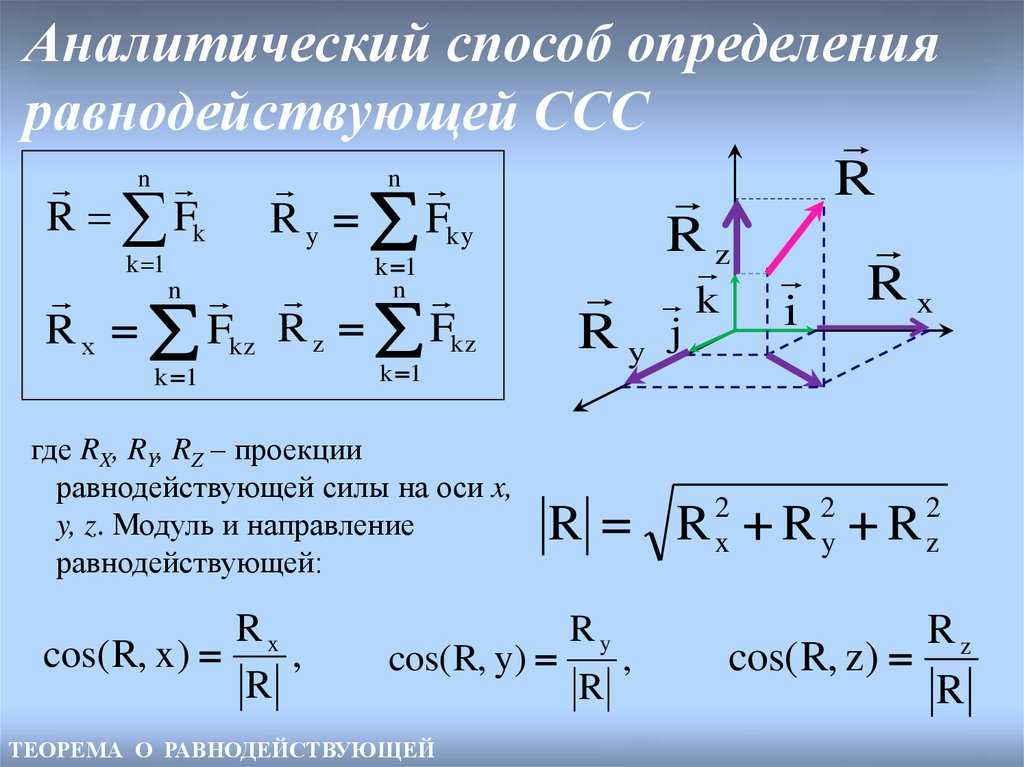
Затем определяются проекции равнодействующей:
а по ним – модуль равнодействующей:
F∑= ![]() (1.3)
(1.3)
α = arctg ![]() (1.4)
(1.4)
Порядок выполнения работы
1.Для заданной системы сходящихся сил в соответствии с вариантом построить в масштабе силовой многоугольник. Записать выбранный масштаб сил. Измерить линейкой длину вектора равнодействующей и транспортиром угол между равнодействующей и осью х. Учитывая масштаб построения, вычислить модуль равнодействующей силы.
2.Вычислить модуль и направление равнодействующей аналитическим методом проекций.
3.Определить относительные погрешности вычисления модуля и направления равнодействующей. При расхождении более 10% вычисления и построения следует проверить.
4.Сделать вывод об уравновешенности заданной системы сил.
5.Ответить на контрольные вопросы.
1.Как производится графическое сложение сил, приложенных к твёрдому телу в одной точке? Влияет ли порядок сложения векторов при построении силового многоугольника на величину равнодействующей?
2.Каково направление равнодействующей силы в силовом многоугольнике?
3.Можно ли построив силовой многоугольник, сделав вывод об уравновешенности заданной системы?
4.Как определяется проекция силы на ось? В каком случае она равна нулю?
5.Каково аналитическое условие равновесия плоской системы сходящихся сил?
6.В каких случаях следует графический способ определения равнодействующей, а в каких – аналитический?
7.Как можно произвести уравновешивание плоской системы сходящихся сил?
F1 = 4 Н, α = 90
2233
Графическое определение равнодействующей.
Выбираем масштаб сил – μF = 0.1 Н/ мм
![]()
Модуль равнодействующей —
![]() F
F
Направление равнодействующей —
![]()
Аналитическое определение равнодействующей проекции заданных сил на оси х и у:
Модуль равнодействующей: F∑
![]()
![]()
![]()
Направление равнодействующей: α
![]()
![]()
Погрешность вычисления модуля равнодействующей.
![]()
![]()
Погрешность вычисления направления равнодействующей
![]()
![]()
Вывод: система является неуравновешенной.
Модуль равнодействующей — F∑![]() = 7.140 Н, направление —
= 7.140 Н, направление —
![]()
Относительные погрешности не превышают 5%
Литература:![]()
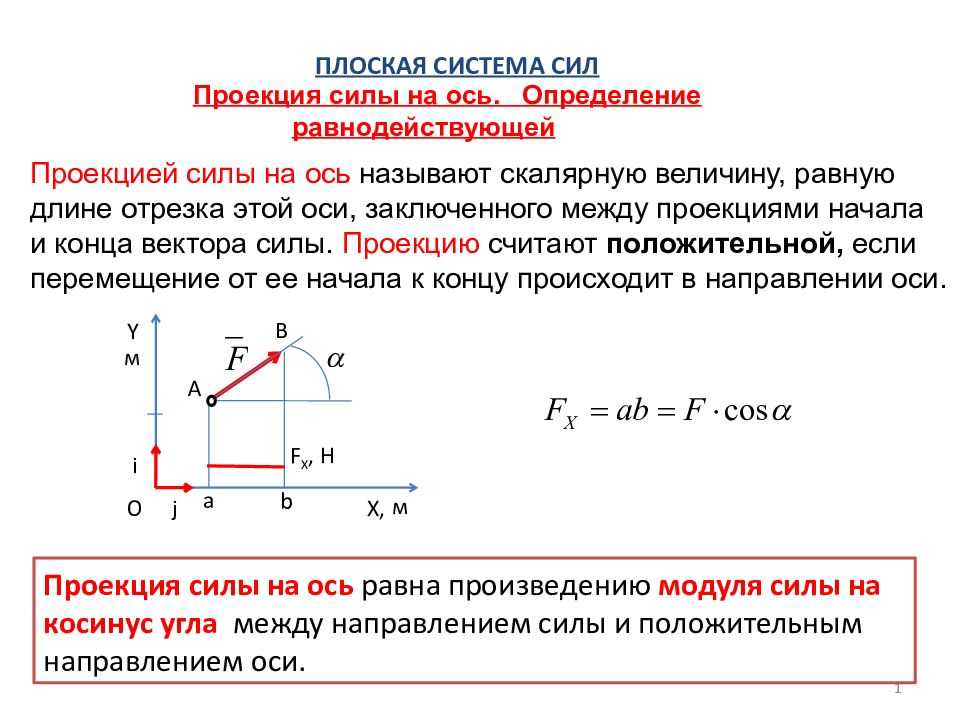
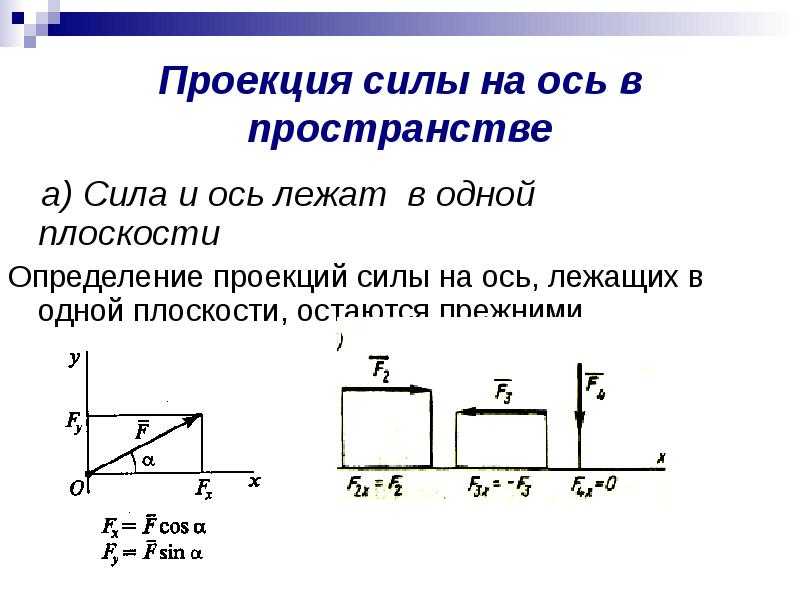
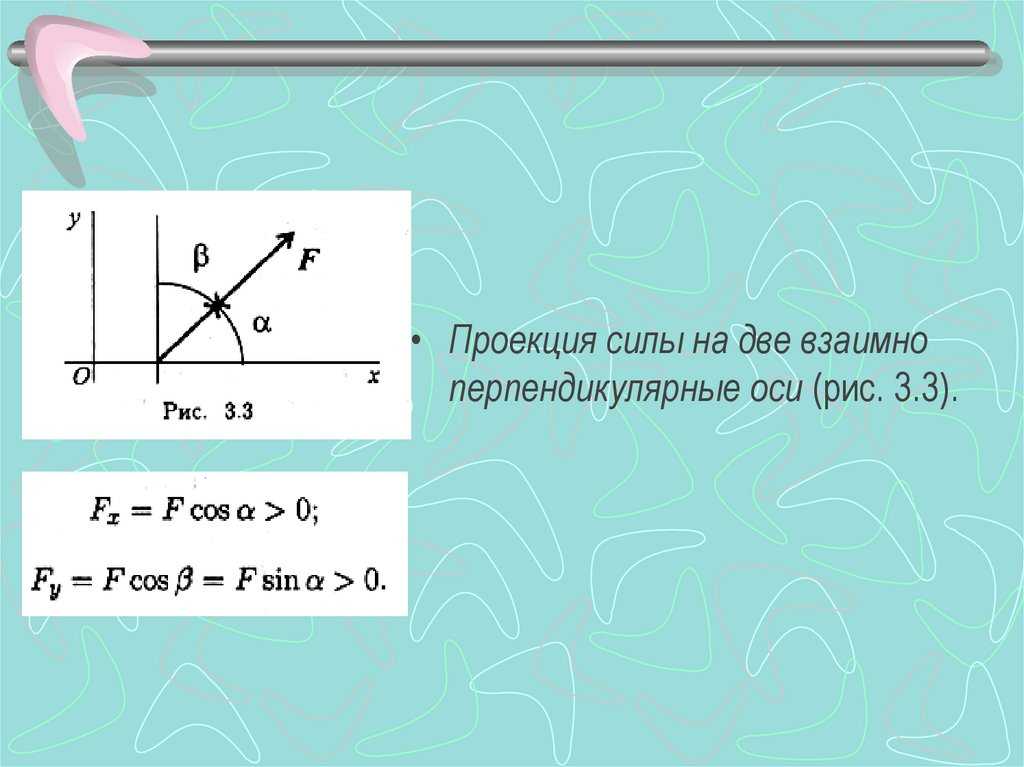
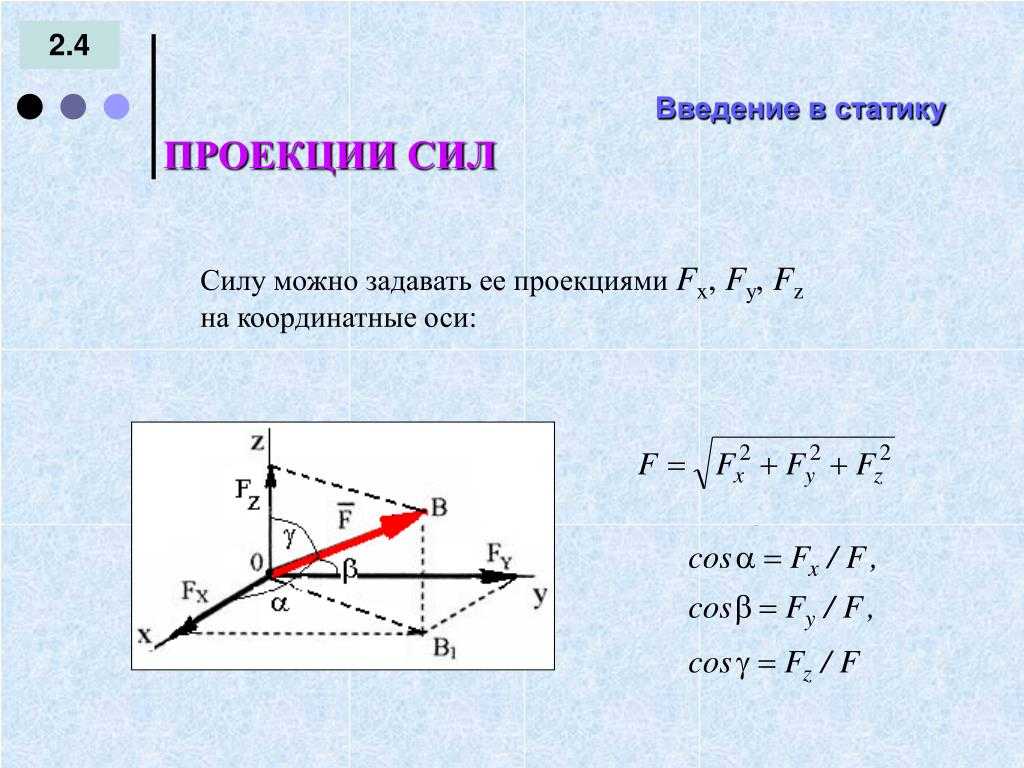
§ 4. Проекция силы на ось. Проекция силы на две взаимно-перпендикулярные оси координат
Кроме рассмотренных выше графического и графоаналитического методов решения задач, в статике широко распространен аналитический метод их решения, или метод проекций.
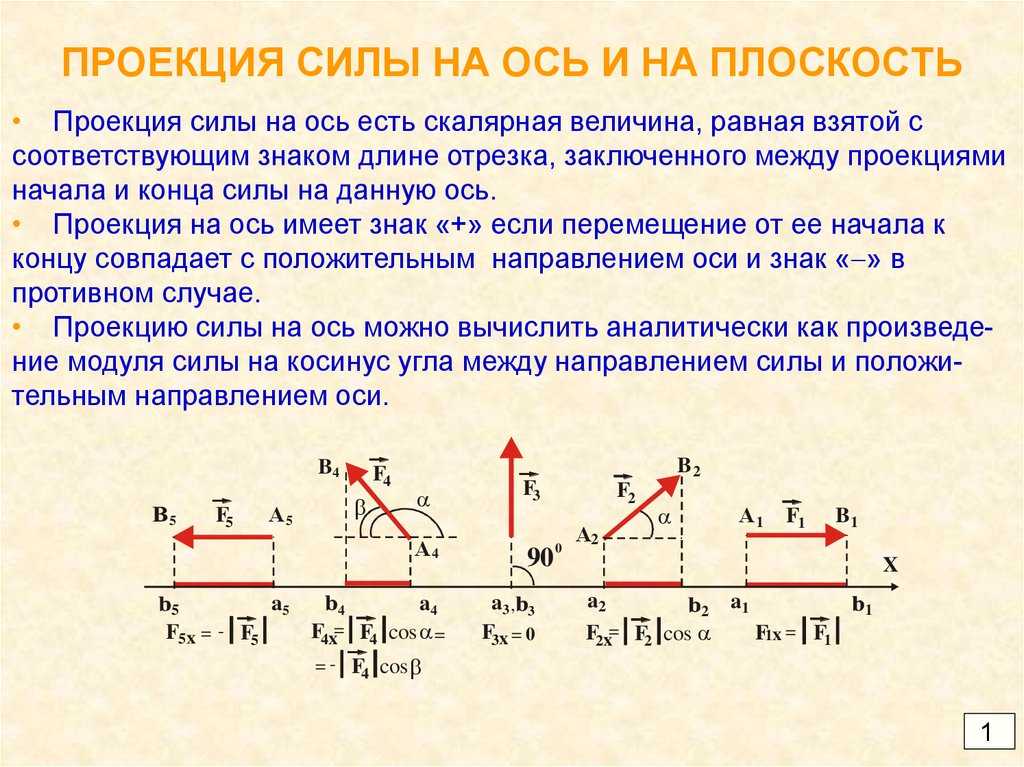
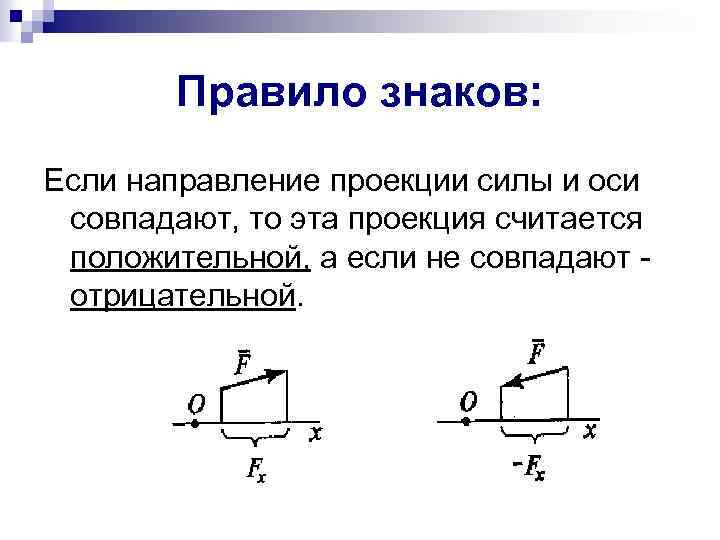
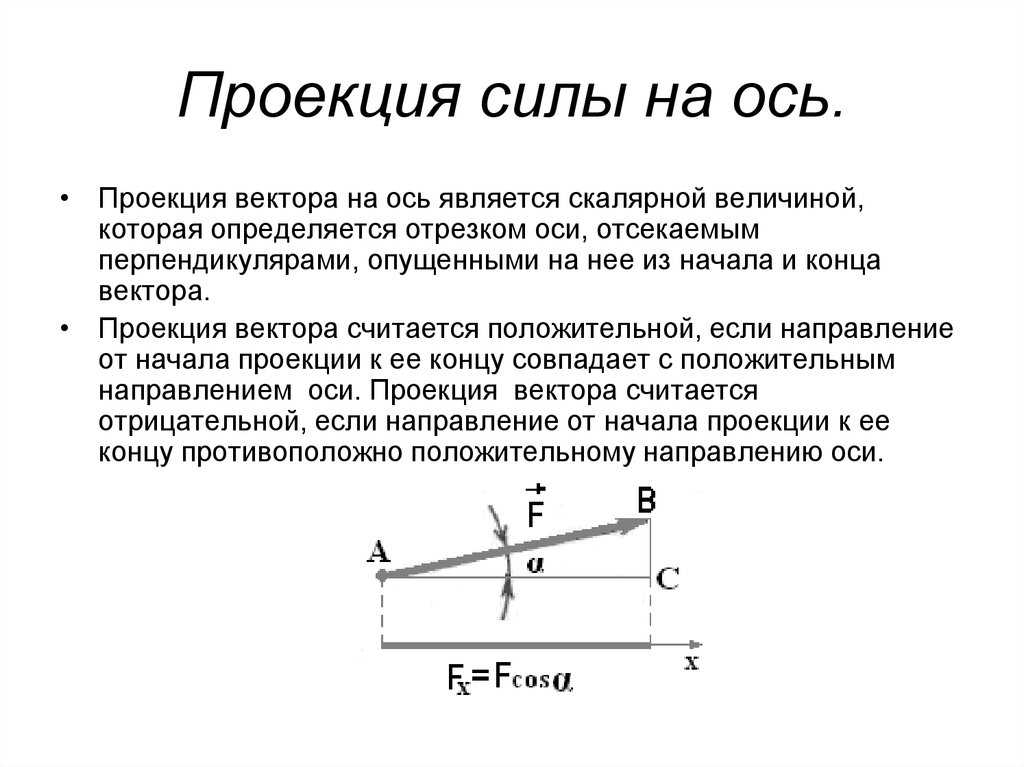
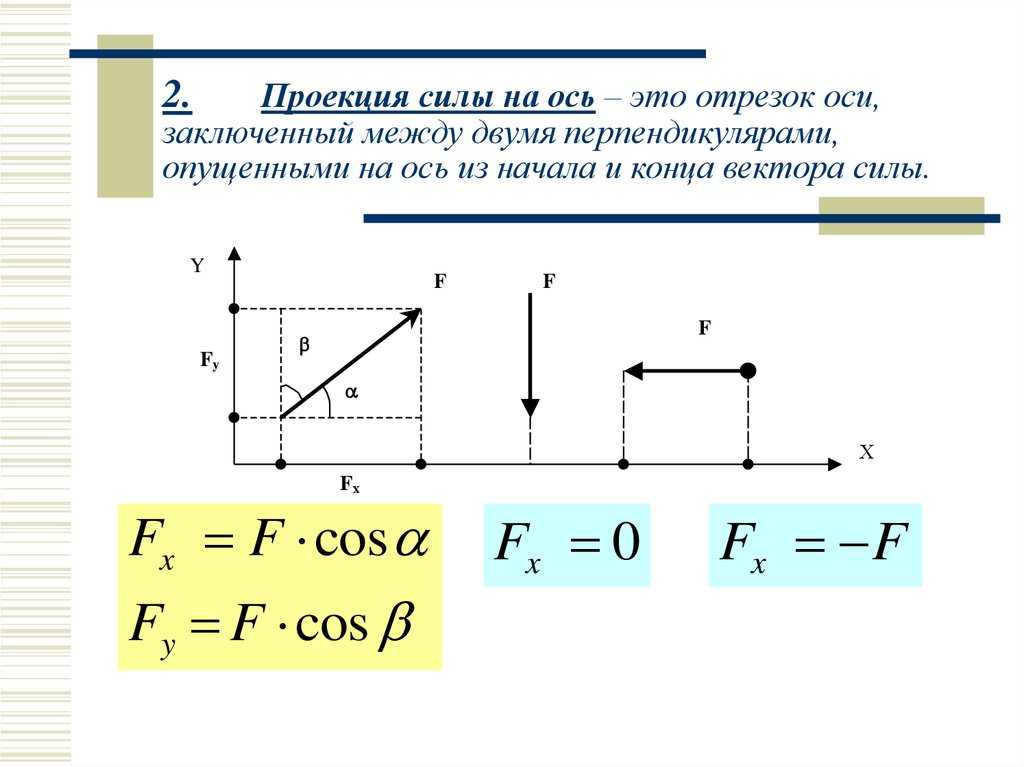
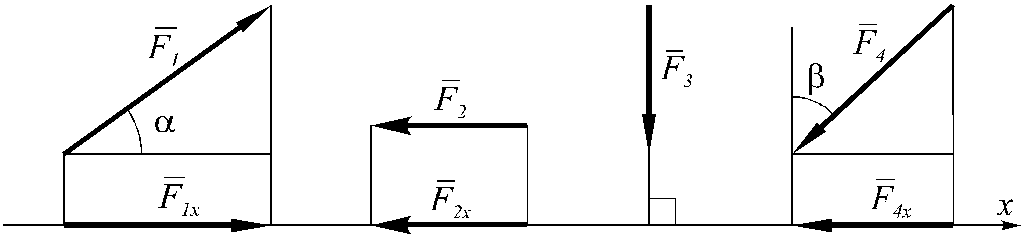
Проекцией силы на ось (рис. 17) является отрезок оси, заключенный между проекциями на эту ось начала и конца вектора силы. Проекцию обычно обозначают той же буквой, что и силу, но с индексом. Например, Fx – проекция силы F на ось х.
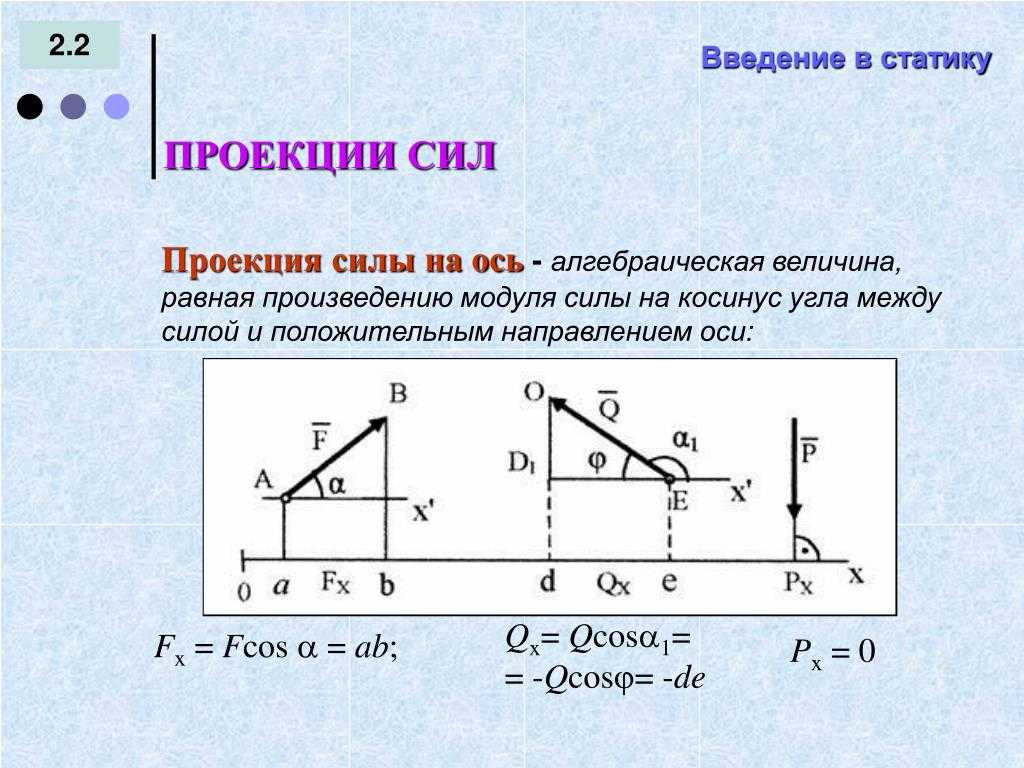
Проекция силы на ось есть величина скалярная. Она может быть положительной, отрицательной или равной нулю в зависимости от величины угла a между направлением силы и положительным направлением оси. Из прямоугольного треугольника ABC следует, что Fx = F сos a, т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси.
Если угол a острый, то проекция положительна (рис. 17), если угол a – тупой, то проекция отрицательна (рис. 18, а):
![]()
Нетрудно убедиться, что проекция силы на ось будет равна нулю, если a = 90° или 270° (рис. 18, б), и равна модулю силы, если a = 0 или a = 180° (рис. 18, в).
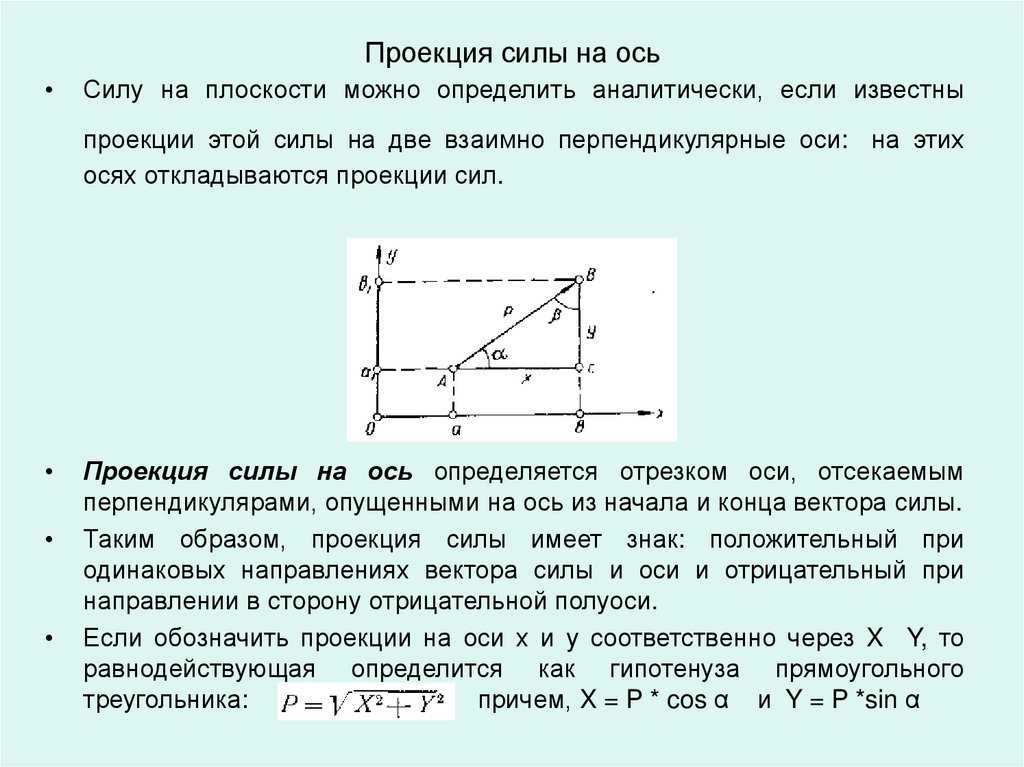
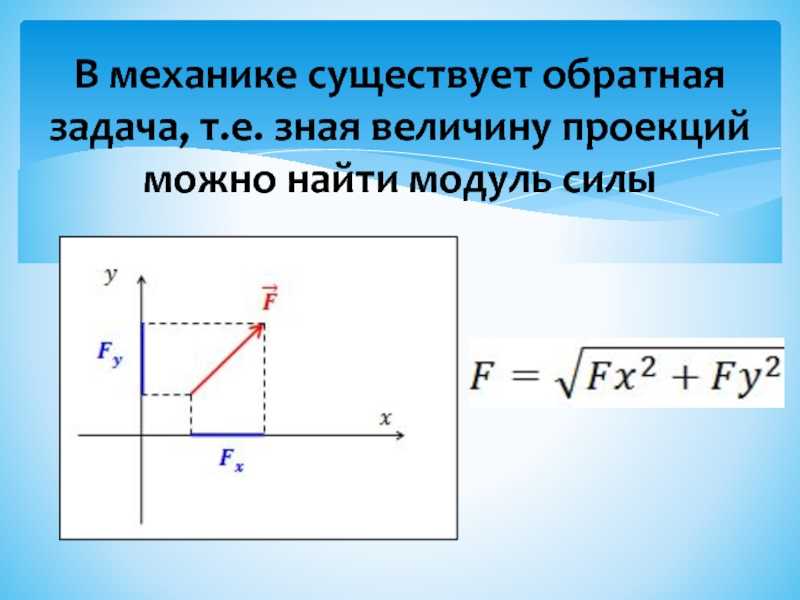
Модуль и направление силы можно определить по ее проекциям на две взаимно перпендикулярные оси (рис. 18, в):
Из треугольника ABC, поскольку АС = Fx и ВС = Fy, следует, что модуль силы F равен
(3)
Направление силы определяют косинусы углов (рис. 19):
; . (4)
Задача 10. В точке В кронштейна ABC (рис. 20, а) подвешен груз М весом 8 кН. Определить реакции стержней кронштейна, если углы кронштейна a = 110°, b = 30° и крепления в точках А, В и С шарнирные.
Решение – методом проекций при помощи уравнений равновесия.
1. Так как три силы , и , действующие на точку В (рис. 21), образуют уравновешенную систему, то алгебраические суммы проекций этих сил на каждую из двух осей координат равны нулю.
2. Выберем оси координат так, чтобы одна из осей совпадала с линией действия одной из неизвестных сил (рис. 21), и составим два уравнения равновесия:
(1)
(2)
кН.
Задача 11. К шарниру В кронштейна ABC прикреплена веревка, перекинутая через блок, к другому концу которой прикреплен груз весом G = l,5 кН (рис. 22). Определить усилия в стержнях АВ и СВ кронштейна, если крепления в точках А и С шарнирные, a = 35° и b = 100°.
Решим задачу методом проекций.
1. Изобразив шарнир В вместе с действующими на него силами и и расположив оси проекций, как показано на рис. 19, составим уравнения равновесия:
(1)
(2)
2. Из уравнения (2)
кН,
а из уравнения (1)
Итак, реакции стержней (их действия на шарнирный болт В) равны NA = 2,57 кН и NС = l,85 кН. Точно с такими же усилиями действует шарнирный болт на стержни. Стержень АВ растянут силой 2,57 кН, а стержень СВ сжат силой 1,85 кН.
Расчет равнодействующей силы при известных силах и углах
Для определения равнодействующей силы в многоугольнике сил, необходимо знать значения сил, действующих на тело, а также углы, под которыми эти силы приложены. Равнодействующая сила представляет собой векторную сумму всех сил, действующих на тело.
Для расчета равнодействующей силы, необходимо разложить каждую из известных сил на горизонтальную и вертикальную составляющую. Затем, горизонтальные и вертикальные составляющие суммируются по отдельности.
Для сил, действующих под углом к горизонтали, можно использовать тригонометрические соотношения, такие как синусы и косинусы. Например, для определения горизонтальной составляющей силы можно использовать следующую формулу:
Fгор = F * cos(α),
где F — значение силы, α — угол, под которым сила действует к горизонтали.
Аналогично, вертикальная составляющая силы может быть определена с помощью формулы:
Fверт = F * sin(α),
где F — значение силы, α — угол, под которым сила действует к вертикали.
После определения горизонтальной и вертикальной составляющей каждой из сил, горизонтальные составляющие суммируются для получения общей горизонтальной составляющей силы, а вертикальные составляющие — для получения общей вертикальной составляющей силы.
Затем, используя найденные значения горизонтальной и вертикальной составляющей, можно определить равнодействующую силу с помощью теоремы Пифагора:
Fр = √(Fгор² + Fверт²),
где Fгор — общая горизонтальная составляющая силы, Fверт — общая вертикальная составляющая силы.
Таким образом, зная значения сил, действующих на тело, и углы, под которыми они приложены, можно провести расчет равнодействующей силы в многоугольнике сил. Это позволяет определить общую силу, действующую на тело, и ее направление.
Сложение сил
В случае, когда на тело действует n сил, говорят о равнодействующей силе, а формула второго закона Ньютона принимает вид:
$m\vec a = \sum\limits_{i=1}^n \vec F_i$
Рис. 1. Равнодействующая сил.
Поскольку F – векторная величина, сумма сил называется геометрической (или векторной). Такое сложение выполняется по правилу треугольника или параллелограмма, либо по компонентам. Поясним каждый метод на примере. Для этого запишем формулу равнодействующей силы в общем виде:
$F = \sum\limits_{i=1}^n \vec F_i$
А силу $F_i$ представим в виде:
$F = (F_{xi}, F_{yi}, F_{zi})$
Тогда суммой двух сил будет новый вектор $F_{ab} = (F_{xb} + F_{xa}, F_{yb} + F_{ya}, F_{zb} + F_{za})$.
Рис. 2. Покомпонентное сложение векторов.
Абсолютное значение равнодействующей можно рассчитать так:
$F = \sqrt{(F_{xb} + F_{xa})^2 + (F_{yb} + F_{ya})^2 + (F_{zb} + F_{za})^2}$
Теперь дадим строгое определение: равнодействующая сила есть векторная сумма всех сил, оказывающих влияние на тело.
Разберем правила треугольника и параллелограмма. Графически это выглядит так:
Рис. 3. Правило треугольника и параллелограмма.
Внешне они кажутся различными, но когда доходит до вычислений, сводятся к нахождению третьей стороны треугольника (или, что тоже самое, диагонали параллелограмма) по теореме косинусов.
Если сил больше двух, иногда удобней пользоваться правилом многоугольника. По своей сути – это всё тот же треугольник, только повторенный на одном рисунке некоторое количество раз. В случае, если по итогу контур получился замкнутым, общее действие сил равно нулю и тело покоится.
Расчет равнодействующей силы в многоугольнике
Для определения равнодействующей силы в многоугольнике необходимо знать значения и направления всех сил, действующих на него. Наиболее удобным способом может быть представление этих сил в виде векторов.
Для расчета равнодействующей силы в многоугольнике можно использовать метод векторной суммы. Сначала необходимо разложить каждую исходную силу на компоненты, параллельные и перпендикулярные направлению равнодействующей силы. Затем просуммировать все параллельные компоненты и перпендикулярные компоненты отдельно.
После этого можно применить теорему Пифагора для нахождения модуля равнодействующей силы:
|R| = √(ΣFx)^2 + (ΣFy)^2
где |R| — модуль равнодействующей силы, ΣFx — сумма параллельных компонент сил, ΣFy — сумма перпендикулярных компонент сил.
После определения модуля равнодействующей силы, можно также определить ее направление, используя тангенс или синус и косинус. Угол φ между равнодействующей силой и осью X можно вычислить по следующей формуле:
φ = arctan(ΣFy / ΣFx)
Таким образом, расчет равнодействующей силы в многоугольнике может быть выполнен с использованием метода векторной суммы и тригонометрических функций. Этот расчет позволяет определить силу, которую можно представить одной силой, действующей на многоугольник в определенном направлении.
| Сила | Направление | Величина |
|---|---|---|
| Сила 1 | θ1 | F1 |
| Сила 2 | θ2 | F2 |
| … | … | … |
| Сила n | θn | Fn |
В таблице представлены исходные силы, их направления и значения.
Расчет равнодействующей силы в многоугольнике является важным инструментом для изучения и анализа уравновешенности системы сил. Он позволяет определить силу, которая будет действовать на многоугольник в целом.
Модуль равнодействующей двух сил
Допустим, тело находится под воздействием двух сил. Они направлены по одной прямой (рис.1).
![]()
- Если силы имеют одинаковые направления (рис.1 (а)), то модуль равнодействующей вычисляется как:
- На рис 1(б) силы направлены по одной прямой, но имеют противоположные направления. Формулой для вычисления модуля равнодействующей в таком случае будет выражение:
Рассмотрим случаи, когда две силы, действующие на тело, направлены под углом друг другу (рис.2).
![]()
В случае, который представлен на рис.2 (а) силы и направлены под углом 900 по отношению друг к другу. Модуль равнодействующей силы можно найти по теореме Пифагора:
- Если угол между векторами сил и отличен от прямого угла, то модуль равнодействующей силы находят по теореме косинусов:
- где – угол между векторами и
Модуль равнодействующей нескольких сил
Пусть на тело действуют силы: , тогда равнодействующая этих сил () находится в соответствии с формулой (1). Для того чтобы вычислить модуль равнодействующей нескольких сил приложенных к телу выполняют следующую последовательность действий:
- Вводят декартову систему координат, выбирают направления осей (X,Y).
- Записывают проекции сил, действующих на тело на избранные оси:
- Вычисляют проекции равнодействующей силы на оси X и Y, при этом складывают проекции сил по осям. Необходимо отметить, что суммирование проводят алгебраическое, то есть учитывают знаки проекций:
- И в заключении модуль равнодействующей силы находят, применяя теорему Пифагора:
Что такое равнодействующая сила
Равнодействующая сила позволяет установить, какую силу нужно приложить в одной точке, чтобы оказать на тело такое же воздействие, как при действии системы сил. Она является результатом векторного сложения всех сил, действующих на тело.
Равнодействующая сила может быть найдена путем разложения системы сил на компоненты или с помощью метода графического построения векторов сил. Она имеет величину, направление и точку приложения, и ее можно представить в виде вектора.
Равнодействующая сила играет важную роль в механике и позволяет определить, какое воздействие оказывает система сил на тело в целом. Равнодействующая сила позволяет анализировать и предсказывать движение тела в пространстве.
Геометрическое определение равнодействующей трех и более сил
Геометрическое определение равнодействующей системы трех и более сил основано на использовании метода параллелограмма или метода составления полигона сил. Эти методы позволяют наглядно представить силы и их равнодействующую в виде графической конструкции.
- Метод параллелограмма
Метод параллелограмма используется для определения равнодействующей двух сил. Пусть имеется две силы F1 и F2, направления которых известны. Для определения равнодействующей нужно построить параллелограмм, стороны которого соответствуют данным силам. Две стороны параллелограмма будут равны F1 и F2, а третья сторона будет равнодействующей R.
Таким образом, можно сказать, что равнодействующая силы, представленной с помощью метода параллелограмма, можно определить как диагональ построенного параллелограмма.
- Метод составления полигона сил
Метод составления полигона сил используется для определения равнодействующей трех или более сил. Пусть имеется несколько сил F1, F2, F3 и т.д., направления которых известны. Для определения равнодействующей нужно построить полигон сил, стороны которого соответствуют данным силам.
Для построения полигона сил на клетчатой бумаге нужно выбрать масштаб, пропорциональный величинам сил. Затем, начиная с произвольной точки, откладывать векторы сил по заданным направлениям и величинам. После того, как все векторы построены, нужно соединить начало первого вектора с концом последнего вектора. Полученная линия будет равнодействующей исходных сил.
Таким образом, геометрическое определение равнодействующей трех и более сил позволяет наглядно представить и вычислить равнодействующую системы сил с помощью метода параллелограмма или метода составления полигона сил.
Как найти модуль равнодействующей силы
| Сила, которая оказывает на материальную точку такое же действие, как и несколько других сил, называется равнодействующей этих сил. Для нахождения вектора равнодействующей силы необходимо геометрически (векторно) сложить все силы, которые действуют на материальную точку. |
Напомним, что сложить векторы геометрически можно с помощью одного из трех правил: правила параллелограмма, правила треугольника или правила многоугольника. Разберём каждое из этих правил в отдельности.
1. Правило параллелограмма. На рисунке по правилу параллелограмма складываются векторы и . Суммарный вектор есть вектор :
Если векторы и не отложены от одной точки, нужно заменить один из векторов равным и отложить его от начала второго вектора, после чего воспользоваться правилом параллелограмма. Например, на рисунке вектор заменен на равный ему вектор , и :
![]()
2. Правило треугольника. На рисунке по правилу треугольника складываются векторы и . В сумме получается вектор :
Если вектор отложен не от конца вектора , нужно заменить его равным и отложенным от конца вектора , после чего воспользоваться правилом треугольника. Например, на рисунке вектор заменен равным ему вектором , и :
![]()
3. Правило многоугольника. Для того, чтобы сложить несколько векторов по правилу параллелограмма, необходимо от произвольной точки отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке :
![]()
Задачи
Решение
Равнодействующей силой будет векторная сумма $F_1$ и $F_2$.
Поэтому запишем:
$\vec F = \vec F_1 + \vec F_2 = (5+3, 0+3) = (8, 3)$ Абсолютное значение равнодействующей силы:
$F = \sqrt{8^2 + 3^2} = \sqrt{64 + 9} = 8,5 Н$
Теперь получим тоже значение при помощи правила треугольника. Для этого сначала найдем абсолютные значения $F_1$ и $F_2$, а также угол между ними.
$F_1 = \sqrt{5^2 + 0^2} = 5 Н$
$F_2 = \sqrt{3^2 + 3^2} = 4,2 Н$
Угол между ними – 45˚, так как первая сила параллельна оси Оx, а вторая делит первую координатную плоскость пополам, то есть является биссектрисой прямоугольного угла.
Теперь, разместив вектора по правилу треугольника, рассчитаем по теореме косинусов равнодействующую:
$F = \sqrt{F_1^2 + F_2^2 – 2F_1F_2 cos135} = \sqrt{F_1^2 + F_2^2 + 2F_1F_2 sin45} = \sqrt{25 + 18 + 2 \cdot 5 \cdot 4,2 \cdot sin45} = 8,5 Н$
Решение
Достаточно сложить иксовые компоненты векторов:
$F = -5 – 2 + 7 = 0$
Что мы узнали?
В ходе урока было введено понятие равнодействующей сил и рассмотрены различные методы ее расчета, а также введена запись второго закона Ньютона для общего случая, когда количество сил неограниченно.
-
/10
Вопрос 1 из 10
Сила — это:
- Непреодолимое влечение
- Мера действия тел друг на друга
- Мера действия тел и полей друг на друга
- Скалярная величина, пропорциональная массе тела.
Задача
Укажите, какой вектор силового многоугольника является равнодействующей силой:
Равнодействующая сила в силовом многоугольнике всегда направлена от начала первого слагаемого вектора к концу последнего. Так как векторы ОА, АВ, ВС,СD направлены последовательно один за другим, то ни один из них не может быть равнодействующей силой.
Равнодействующей силой является вектор ОD.
-
Достопримечательности австралии и океании кратко
-
Актуальность произведения премудрый пескарь кратко
-
Нойз мс биография кратко
-
Терминология в баскетболе кратко
- Казахстан в годы гражданской войны и иностранной интервенции кратко
Примеры решения задач на определение равнодействующей силы
Пример 1:
Рассмотрим многоугольник из 4-х сил:
- Сила 1: 10 Н
- Сила 2: 5 Н
- Сила 3: 7 Н
- Сила 4: 8 Н
Для определения равнодействующей силы необходимо найти горизонтальную и вертикальную компоненты каждой силы и сложить их. Затем найденные компоненты складываются. В данном случае получим:
Горизонтальная компонента: 10 — 5 + 7 — 8 = 4 Н
Вертикальная компонента: 0
Таким образом, равнодействующая сила в данном многоугольнике равна 4 Н.
Пример 2:
Рассмотрим многоугольник из 3-х сил:
- Сила 1: 6 Н
- Сила 2: 12 Н
- Сила 3: 8 Н
Аналогично предыдущему примеру, находим горизонтальные и вертикальные компоненты каждой силы и складываем их. Получим:
Горизонтальная компонента: 6 — 12 + 8 = 2 Н
Вертикальная компонента: 0
Равнодействующая сила в данном случае также равна 2 Н.
Пример 3:
Рассмотрим многоугольник из 5-ти сил:
- Сила 1: 10 Н
- Сила 2: 6 Н
- Сила 3: 4 Н
- Сила 4: 8 Н
- Сила 5: 9 Н
Производим аналогичные вычисления:
Горизонтальная компонента: 10 — 6 + 4 — 8 + 9 = 9 Н
Вертикальная компонента: 0
Таким образом, равнодействующая сила равна 9 Н.
Все вычисления проводятся по аналогии, используя соответствующие формулы и законы механики.
Понятие силы
Возникло еще в трудах древнегреческих ученых. Носило скорее философский характер и было довольно запутанным и неоднозначным, что не мешало при этом античным инженерам-практикам производить весьма точные расчеты, поскольку понимание силы как причины движения было для них безусловным.

![]()
Позже проблемой занимались такие титаны как Роджер Бэкон и Уильям Оккам (английские философы и естествоиспытатели). Опять-таки без строгого физического подхода, но с более глубоким пониманием темы (теория «дальнодействия»).
Бэкман, Декарт, Галилей аргументированно оспорили архаичные теории. Классическая механика пробивала дорогу.
Иоганн Кеплер также придавал сначала силе эзотерические свойства. Но наблюдения за закономерностями перемещения небесных тел убили плохого теолога и породили ученого. Логично появилась идея общей силы тяготения. До Ньютона, вопреки распространенному заблуждению.
Ньютон подытожил и объединил ранее накопленные знания. Установил формулу зависимости действующей на тело силы с его движением (II-ой закон).
Где:
-
F – вектор (также имеется направление приложения) силы. В принятой РФ системе СИ (ISQ) измеряется в Ньютонах (Н, N в международном написании);
-
m – масса материальной точки (кг);
-
a – вектор получаемого ускорения (м/с2).
При этом определение силы дано не было. Оно и понятно: явление не существует само по себе. Термин появился только для удобства расчетов и подразумевает меру воздействия стороннего тела или поля на наблюдаемый объект.
Возможно, что гравитация является действием поля. Закон всемирного тяготения был введен также Ньютоном.
Где:
· G – гравитационная постоянная;
· m1, m2 – массы материальных точек (кг);
· R – дистанция между объектами (м).
Тяготение Земли рассчитывается по традиционной формуле II-го закона Ньютона. Только «a» меняется на ускорение свободного падения «g».
Для примерных выкладок g берут равным 9,81 м/с2, что соответствует средней широте 45,5°. Для точных пользуются соответствующими таблицами.
Геометрическое определение равнодействующей двух сил
Геометрический способ определения равнодействующей системы сил позволяет наглядно представить действие двух сил на тело и определить их равнодействующую.
Для определения равнодействующей двух сил необходимо построить векторы сил в начале координат. Затем нужно соединить концы векторов и построить вектор равнодействующей, который будет направлен от начала координат к этой точке.
Если результирующий вектор равнодействующей имеет ненулевую длину, то это означает, что две силы не компенсируют друг друга и на тело будет действовать равнодействующая сила. Если же результирующий вектор равнодействующей имеет нулевую длину, то это означает, что две силы компенсируют друг друга и на тело не будет действовать равнодействующая сила.
Например, если одна сила направлена вправо, а другая вверх, то результирующая сила будет направлена по диагонали от начала координат до точки, в которой соединены концы векторов. Величина равнодействующей силы будет определяться длиной результирующего вектора.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .